Einführung
Um die AmsNAT-Funktion besser zu verstehen, ist es wichtig, den Unterschied zwischen ADS und AMS zu kennen und zu wissen, was eine ADS-Route ist.
ADS (Automation Device Specification) ist das Kommunikationsprotokoll von TwinCAT, das die Interaktion zwischen zwei ADS-Teilnehmern spezifiziert. Es legt zum Beispiel fest, welche Operationen auf einem anderen ADS-Gerät ausgeführt werden können, welche Parameter dazu erforderlich sind und welcher Rückgabewert nach Ausführung gesendet wird.
AMS (Autmation Message Specification) spezifiziert den Austausch der ADS-Daten. Wesentlicher Bestandteil des Kommunikationsprotokolls ist die AmsNetId. Diese wird in einem AMS/ADS-Paket für das Quell- und Zielgerät angegeben. Anhand der AmsNetId kann ein ADS-Gerät eindeutig adressiert werden.
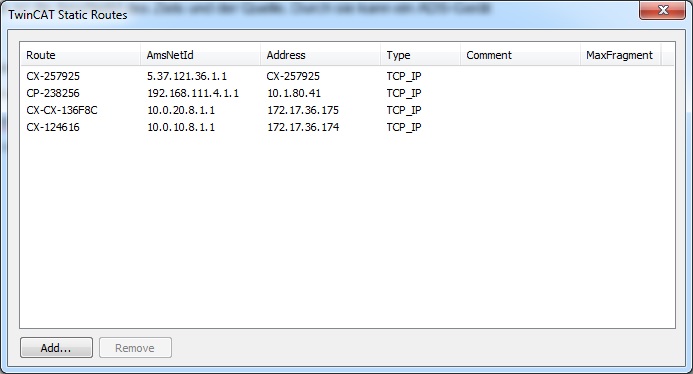
Damit zwei Teilnehmer kommunizieren können, muss in TwinCAT eine Route zwischen diesen eingerichtet sein. Diese wird auf beiden Seiten konfiguriert und enthält typischerweise den Routennamen, die AmsNetId und die Adresse des Kommunikationspartners sowie den Verbindungstyp. Die folgende Abbildung zeigt die Konfiguration neuer Routen und eine Übersicht bestehender Routen eines TwinCAT-Systems.
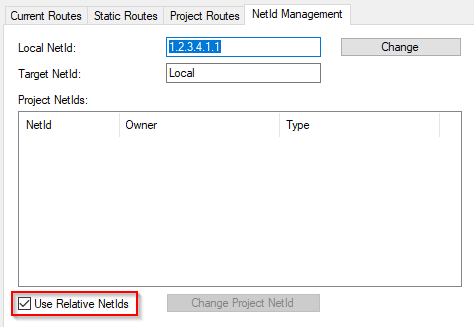
Falls auf dem Ziel ein Scan der Hardware vorgenommen werden soll, so müssen relative NetIds verwendet werden: