Inbetriebnahme
 | Exemplarische Inbetriebnahme Das Vorgehen bei der Inbetriebnahme wird exemplarisch beschrieben. Je nach Einsatz der Komponenten kann auch ein anderes Vorgehen sinnvoll und erforderlich sein. |
| Voraussetzungen zur Inbetriebnahme Vor der Inbetriebnahme des AL8200 MES sind folgende Schritte zu erledigen:
|
Die Inbetriebnahme des AL8200 MES ist wie folgt zu tätigen:
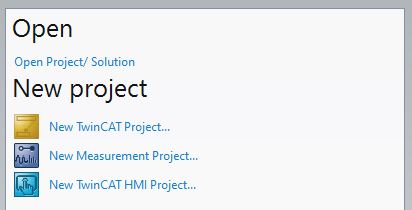
- 1. Neues TwinCAT-Projekt erstellen
- 2. Wenn mit Zielsystem verbunden, Devices scannen
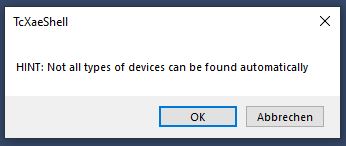
- 3. Meldung „HINT: Not all types of devices can be found automatically” mit “ok” akzeptieren
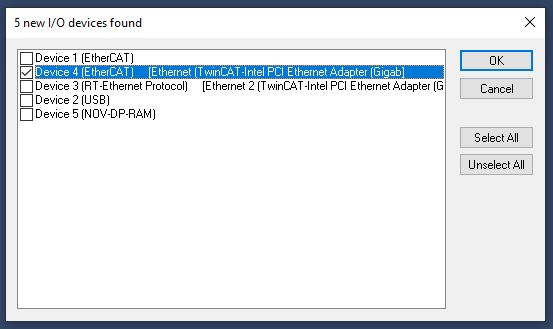
- 4. Ethernet Port auswählen
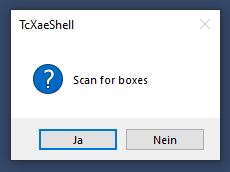
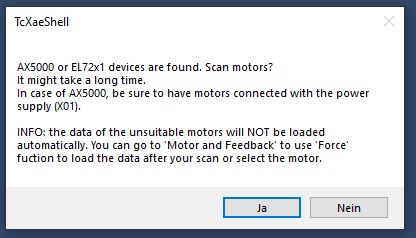
- 5. Aufforderung zum Scannen mit „ja“ bestätigen
- 6. AX5000 Motorscan Schaltfläche „nein“ auswählen (Linearmotoren können aktuell nicht gescannt werden)
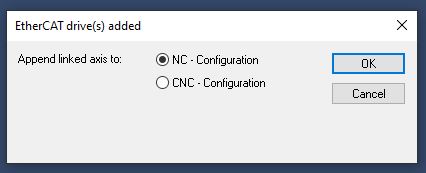
- 7. NC- oder CNC-Achse wählen
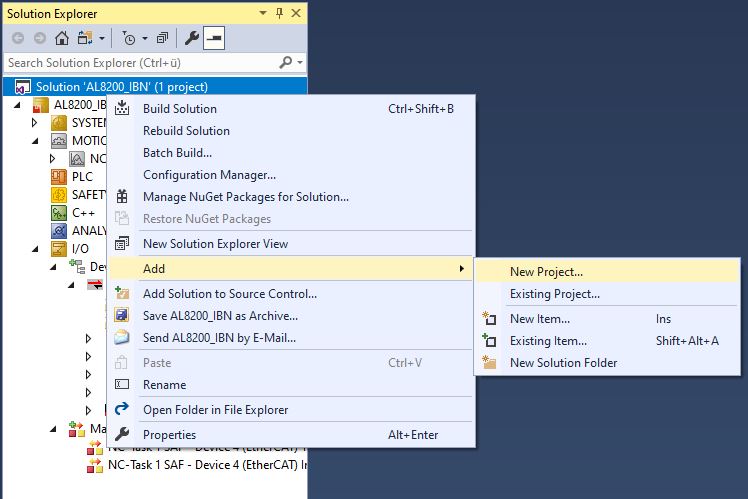
- 8. Neues Projekt hinzufügen
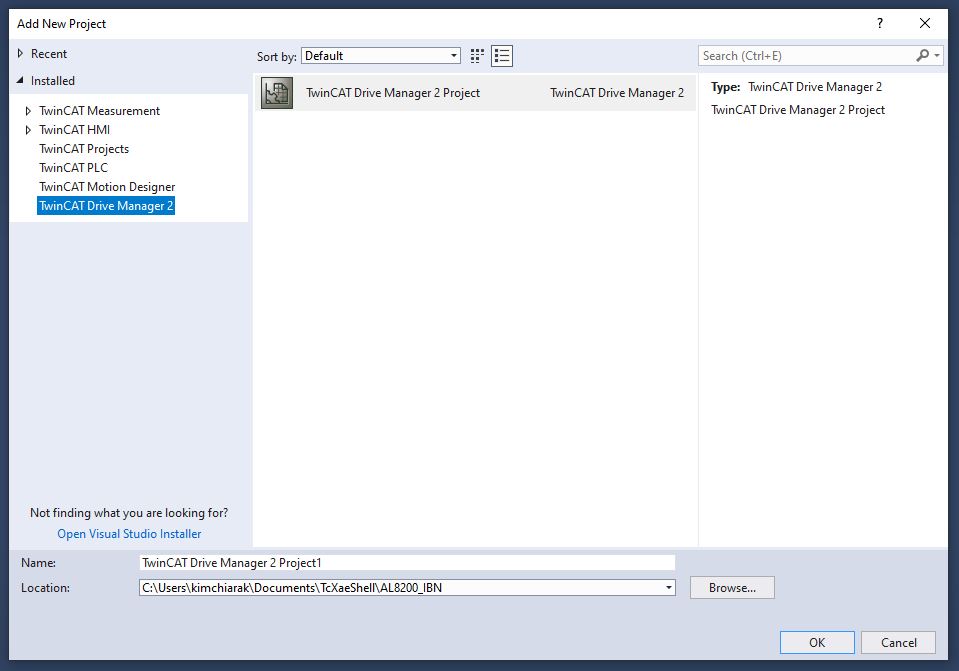
- 9. Neues Drive Manager 2 Projekt auswählen
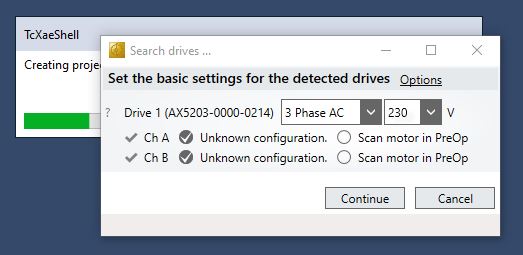
- 10. Abfrage Versorgungsspannung und Motor Scan mit „Continue“ bestätigen
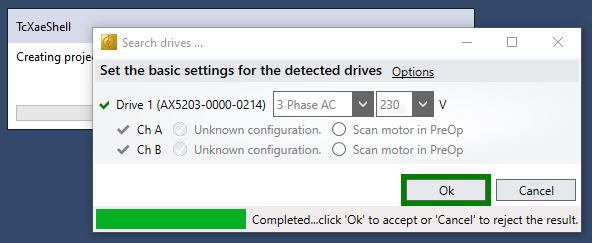
- 11. Schaltfläche „OK“ auswählen
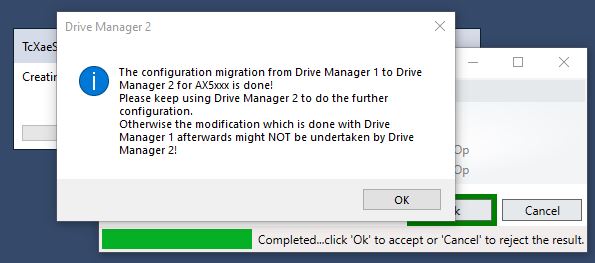
- 12. Aufkommende Meldung mit „OK“ bestätigen
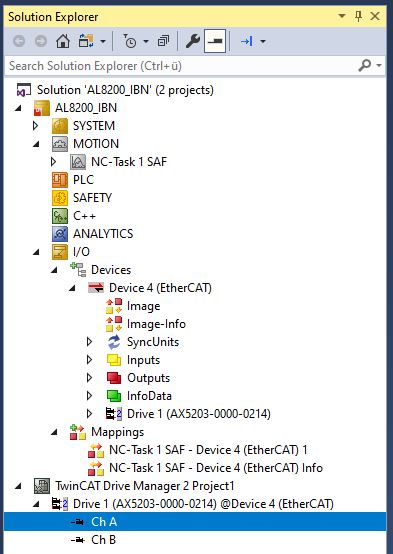
- 13. Im Solution Explorer unter dem Drive Manager 2 Projekt den betreffenden Channel öffnen
- 14. Der Drive Manager 2 öffnet sich
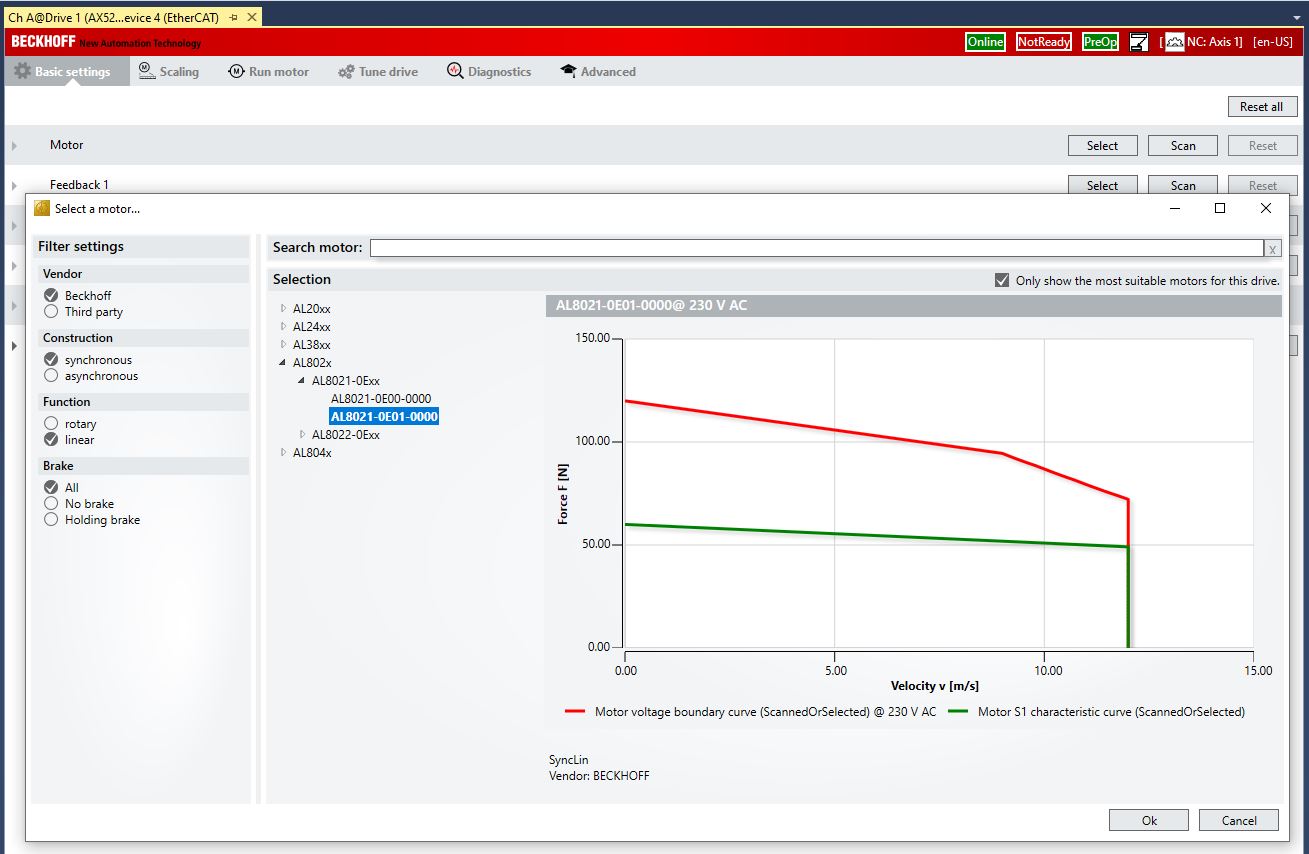
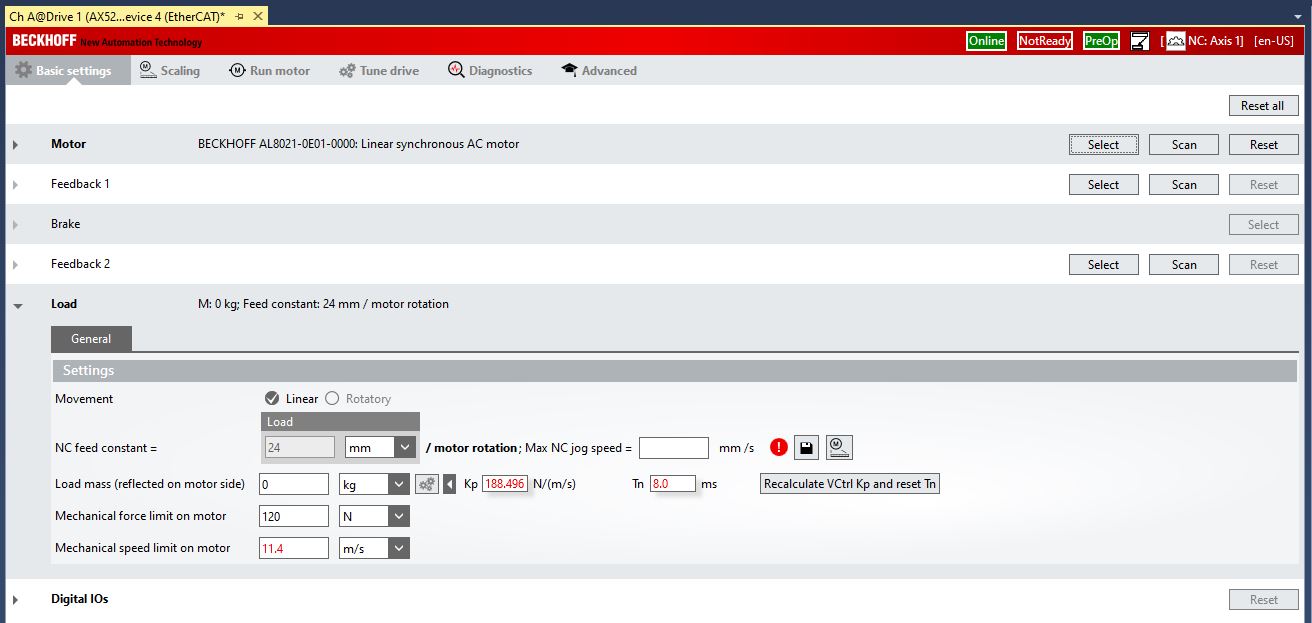
- 15. Unter „Motor/Select“ den Linearmotor AL8000 auswählen
- 16. Im Untermenü „Load“ Vorschub und Masse parametrieren und speichern
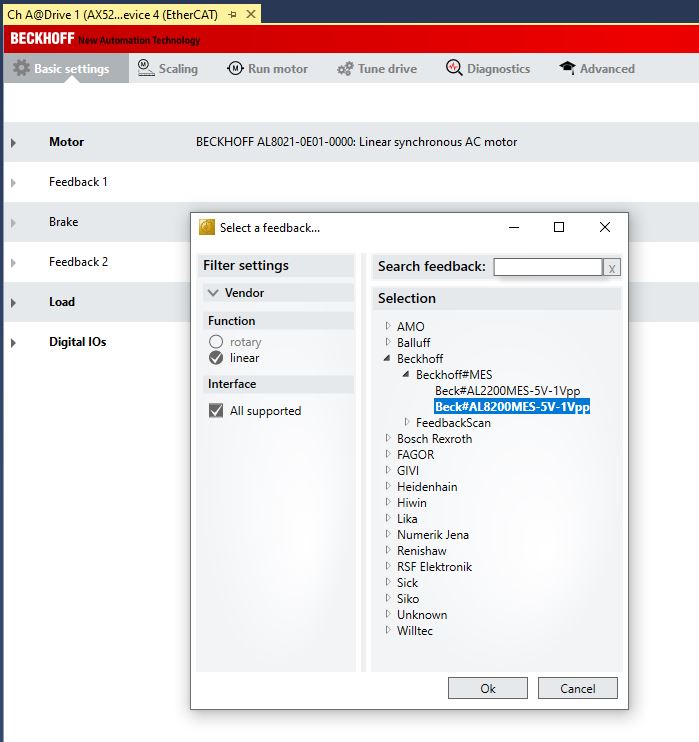
- 17. Feedback auswählen (Beck#AL8200MES-5V-1Vpp)
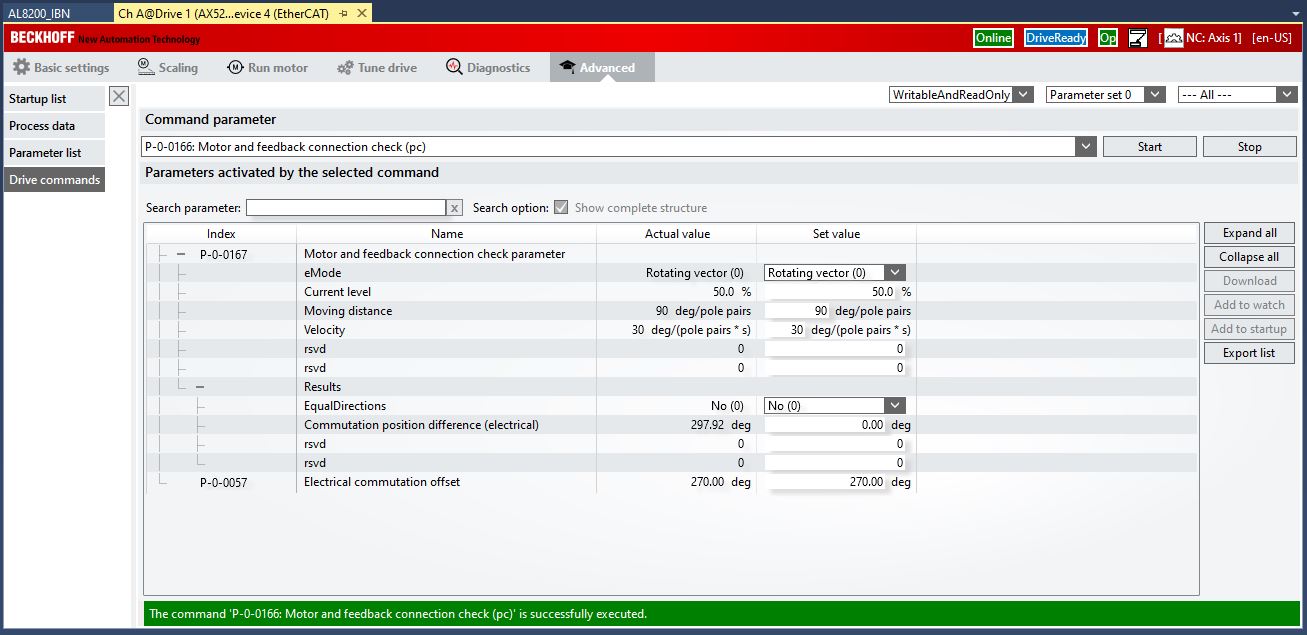
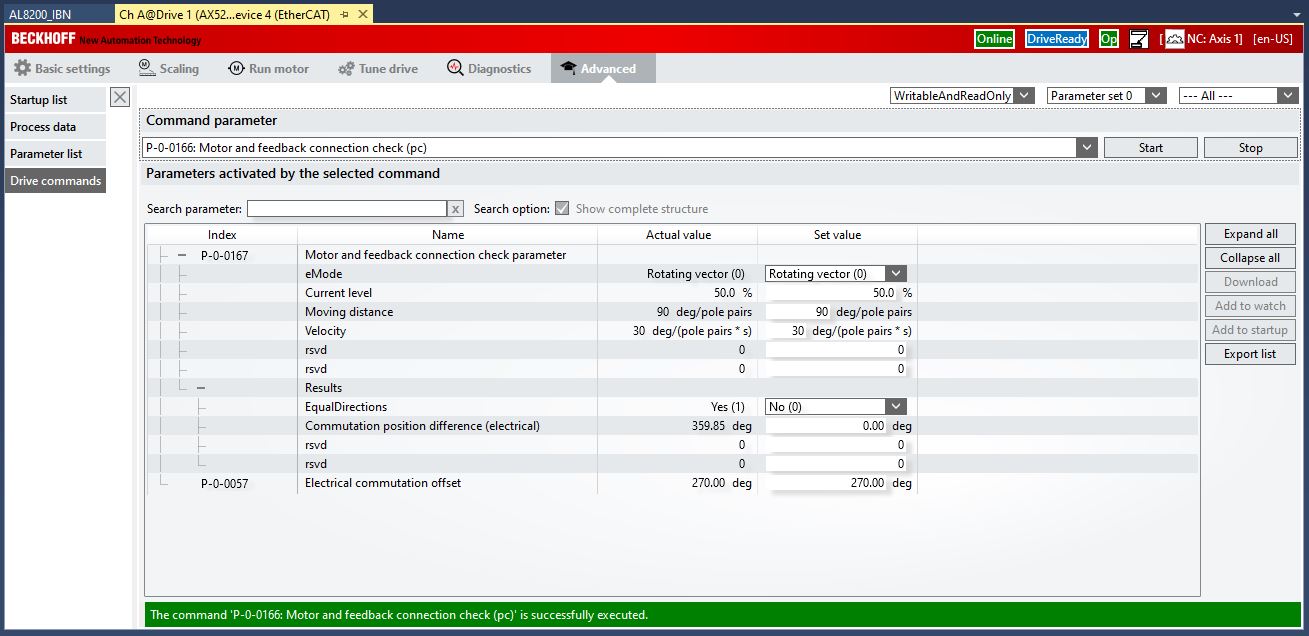
- 18. Im Parameter P-0-0166 Drehrichtung und Kommutierungswinkel ermitteln (siehe auch Systemhandbuch AX5000, Kapitel 9.6.2)
- 19. „Equal directions“ / „Yes“
Der Wert für "Commutation position difference" sollte jetzt im Bereich: 355...360 = 0...5 liegen. - 20. „Commutation mode“ im Parameter P-0-0150 auf „Commutation offset 0 deg (2)“ stellen


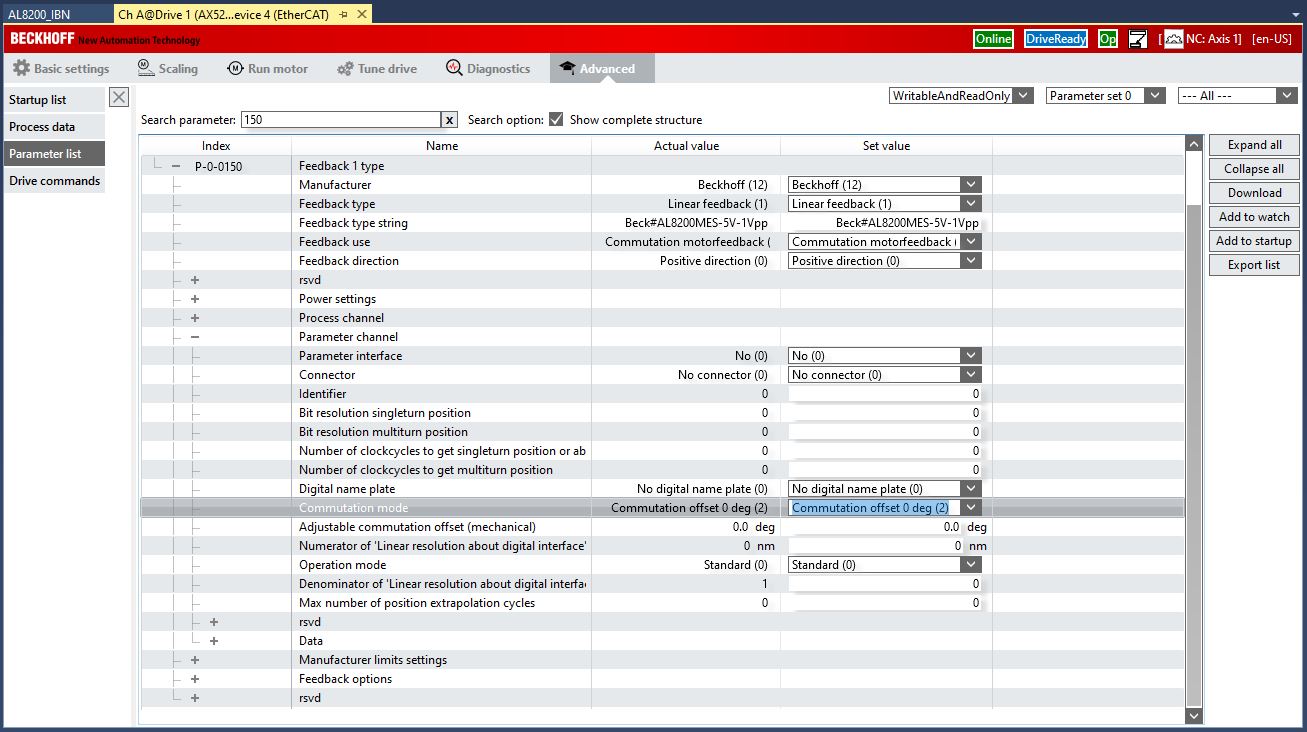
Die Achse kann im Anschluss z.B. zur Regleroptimierung verfahren werden.