TC_SysLatency
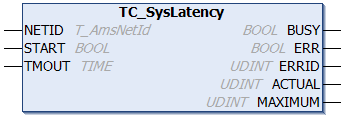
The function block TC_SysLatency can be used to determine the current and maximum latency time of a TwinCAT system. The function corresponds to the TwinCAT latency time display in the TwinCAT system menu under real-time settings.
 Inputs
Inputs
VAR_INPUT
NETID : T_AmsNetId;
START : BOOL;
TMOUT : TIME := DEFAULT_ADS_TIMEOUT;
END_VARName | Type | Description |
|---|---|---|
NETID | T_AmsNetID | A string with the network address of the TwinCAT computer whose latency time is to be determined can be specified here. For the local computer an empty string may be specified. |
START | BOOL | The function block is enabled by a positive edge at this input. |
TMOUT | TIME | Time-out period that may not be exceeded when executing the ADS command. |
 Outputs
Outputs
VAR_OUTPUT
BUSY : BOOL;
ERR : BOOL;
ERRID : UDINT;
ACTUAL : UDINT;
MAXIMUM : UDINT;
END_VARName | Type | Description |
|---|---|---|
BUSY | BOOL | When the function block is enabled, this output is set and remains set until a feedback is received. |
ERR | BOOL | If an ADS error should occur during the transfer of the command, then this output is set once the BUSY output is reset. |
ERRID | UDINT | Returns the ADS error number when the ERR output is set. |
ACTUAL | UDINT | The current latency time of a TwinCAT system in µs. |
MAXIMUM | UDINT | The maximum latency time of a TwinCAT system in µs (maximum latency time since the TwinCAT system was last started). |
Requirements
Development environment | Target platform | PLC libraries to be integrated (category group) |
|---|---|---|
TwinCAT v3.1.0 | PC or CX (x86, x64, Arm®) | Tc2_Utilities (System) |