Settings
KL2542 parameterization settings.
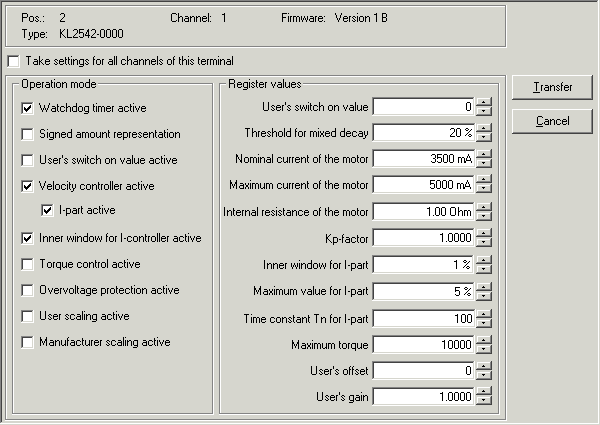
Operation mode
Watchdog timer active (R32.2)
Here you can deactivate the watchdog (default: active). If the DC motor output stage fails to receive process data from the controller for 100 ms when the watchdog is active, the watchdog is triggered, and the motor stops.
Signed amount representation (R32.3)
Here you can activate the signed amount representation (default: inactive).
User switch-on value active (R32.8)
You can activate the user switch-on value here (the default is inactive).
Inner window for I-controller active (R32.13)
Here you can deactivate the inner window for the I-controller (default: active).
Overvoltage protection active (R32.10)
Here you can activate overvoltage protection (chopper resistor) for channel 2 (default: inactive).
Register values
User switch-on value (R35)
Here you can specify the user switch-on value for the velocity (default: 0).
Switching threshold for MixedDecay (R41)
Here you can specify the automatic switch-off threshold for MixedDecay (default: 20%).
Maximum motor current (R36)
Here you can specify the maximum motor coil current.
The default is 5000 mA
Inner window for I-controller (R43)
Here you can specify the Kp factor for the internal velocity control (default: 1%).
The I-component of the velocity control is attenuated towards the zero point. This register specifies the value from which the attenuation is activated.
Maximum value for I-controller (R44)
Here you can specify the maximum value for the I-component (default: 5%).
Time constant Tn for I-controller (R45)
Here you can specify the time constant Tn (default: 100).
The time constant controls the time response of the I-controller.
Maximum torque (R38)
Here you can specify the maximum torque for the application (default: 10000), see description of register R2.
If the current value (register R2) exceeds this threshold, only a warning is issued if torque monitoring is disabled (SB1.5=1 and R0.13=1). If torque monitoring is active (R32.9=1), the motor is de-energized and an error is issued (SB1.6=1 and R0.13=1).