The mapping concept
EtherCAT slaves are directly linked in the System Manager with the process image of a task. This leads to so-called synchronous mapping, i.e. write/read access to the process image takes place alternately through I/O update/fieldbus and task.
 Fig.250: System Manager icons for synchronous/asynchronous mapping
Fig.250: System Manager icons for synchronous/asynchronous mappingWith asynchronous mapping the two processes “Task” and “Fieldbus Update” access the process image in their respective cycle time.
Link effect
If I/Os are linked directly with a task, the corresponding EtherCAT fieldbus update takes place synchronous with this task cycle time. No more than “max. Sync Task” I/O cycles are executed. (EtherCAT master --> advanced settings --> cyclic task).
If devices are not linked with a task, they are controlled via asynchronous mapping based on the slowest available task. This is also the case with automatically set up cross communication, for example in safety devices.
 | Watchdog Check the mapping settings to ensure that timings set up in this way do not exceed the watchdog times.
|
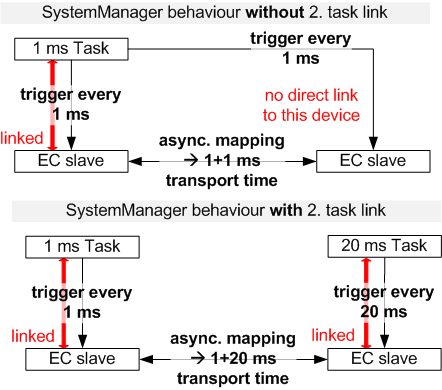 Fig.251: Automatically set-up asynchronous mapping
Fig.251: Automatically set-up asynchronous mapping