Distinction between Online and Offline
The distinction between online and offline refers to the existence of the actual I/O environment (drives, terminals, box modules).
If the configuration is to be prepared in advance of the system configuration as a programming system, e.g. on a laptop, this is only possible in "Offline configuration" mode. In this case all components have to be entered manually in the configuration, e.g. based on the electrical design (as described under TwinCAT configuration setup, manual).
If the designed control system is already connected to the EtherCAT system and all components are energized and the infrastructure is ready for operation, the TwinCAT configuration can simply be generated through "scanning" from the runtime system. This is referred to as online configuration.
In any case, during each startup the EtherCAT master checks whether the devices it finds match the configuration.
To ensure that the latest features/settings of the master can be used, always download the latest ESI file. Please note the following information.
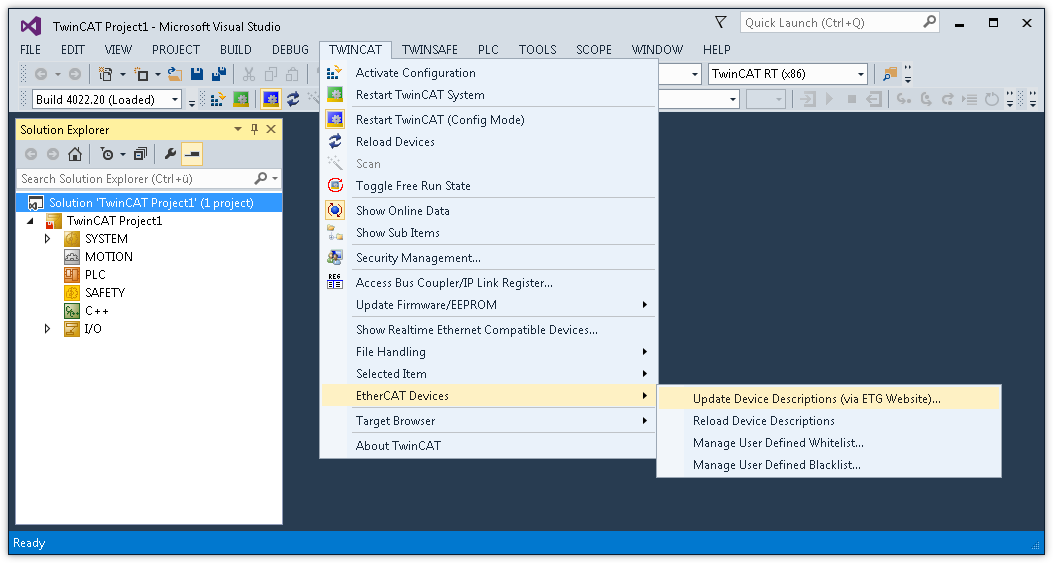
 | Installation of the latest ESI-XML device description The TwinCAT System Manager needs the device description files for the devices to be used in order to generate the configuration in online or offline mode. The device descriptions are contained in the so-called ESI files (EtherCAT Slave Information) in XML format. These files can be requested from the respective vendor and are made available for download. The ESI files for Beckhoff EtherCAT/EtherCAT P devices are available on the Beckhoff website (https://www.beckhoff.de/english/download/elconfg.htm?id=1983920606140). The ESI files should be stored in the TwinCAT installation directory (default: C:\TwinCAT\IO\EtherCAT). The files are read (once) when a new System Manager window is opened. A TwinCAT installation includes the Beckhoff ESI files that were current at the time when the TwinCAT build was created. From TwinCAT 2.11 and in TwinCAT 3 the ESI directory can be updated from the System Manager, if the programming PC is connected to the internet (TwinCAT → EtherCAT Devices → Update Device Description…)
|