Quick start
Parameterization of the main settings
The parameters are set at the factory so that the box is ready for use in most applications without further parameterization.
Set the parameter Max Current [mA] (0x8050:10) such that the maximum inductance current is not exceeded.
Info data objects
Via the info data objects additional information can be transferred synchronously. For each channel two of these objects are available.
The synchronous info data can be activated in the TwinCAT System Manager via the "Process Data" tab (0x1A07).
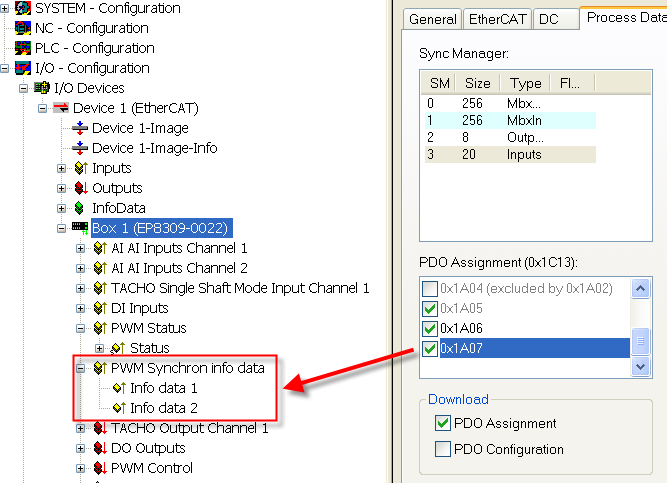
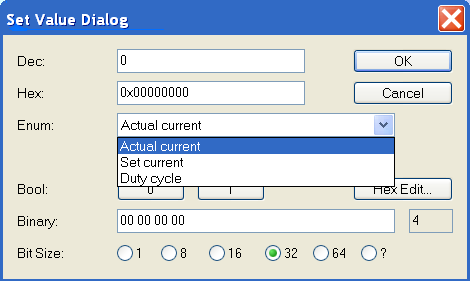
Objects 0x8050:21 and 0x8050:22 can be used to set the value to be transferred synchronously.
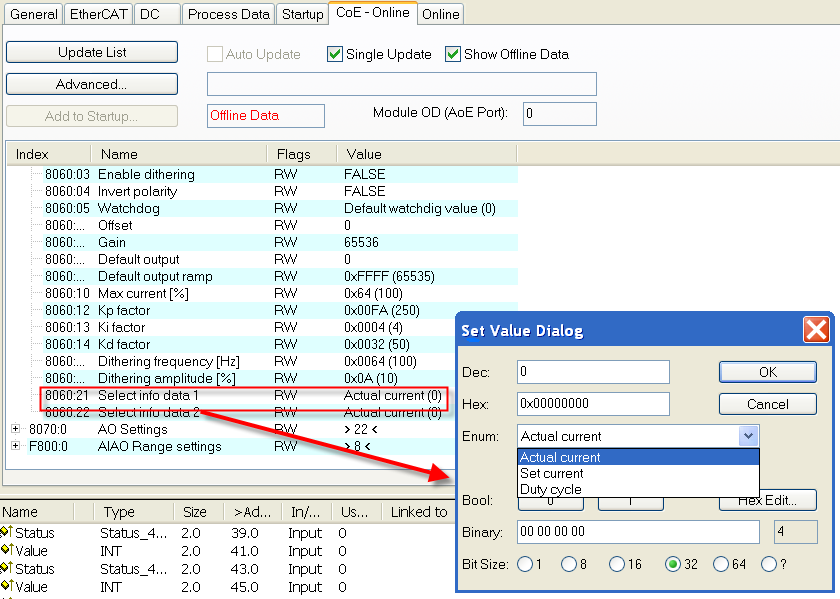
The following entries are available:
Value | Text | Description |
|---|---|---|
0 | Actual current | Actual current in mA |
1 | Set current | Set current in mA |
2 | Duty Cycle | The PWM duty cycle of the output stage. A value of 1000 corresponds to 100% duty cycle. |
Watchdog
The analog output value can, e.g. in the case of a failure of communication with the controller, be set to a user-specific value.
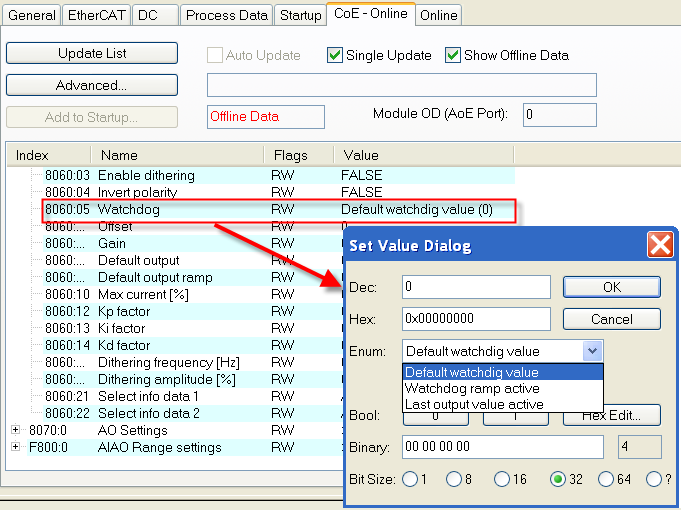
Three parameterization options are available for this purpose:
Watchdog object (0x8050:05) | Behavior |
|---|---|
0: Default watchdog value | The substitute switching value (0x8050:0D) is output on error. |
1: Watchdog ramp active | On error the output value is moved to the default value (0x8050:0D) with the ramp time set under 0x8050:0E The ramp time is specified in digits / ms. If the entry is 100 and the default value 0, for example, it takes 327 ms (32767/100) for the output value to change from the maximum value (32767) to the default value in the event of a fault. |
2: Last output value active | In the event of a fault (watchdog drop) the last process data is issued. |
Optimization of the current control parameters
In order to be able to support all possible loads ex factory, the terminal was parameterized with moderate controller characteristics. Current regulation can be improved significantly by adapting the controller parameters to the actual load.
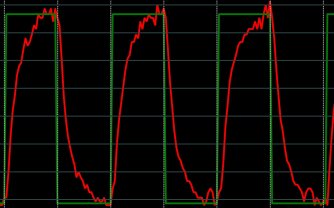
To determine the settings a current pulse is applied to the load. This pulse can be picked up with an oscilloscope or with TwinCAT ScopeView.
For evaluation with TwinCAT ScopeView the set and actual current is displayed in the synchronous info data.
EP8309 standard parameters (20 ms/div) Green: Set current |
Optimized parameters (20 ms/div) Green: Set current |


The required step response can be set using the parameters Kp,Ki, and Kd (0x8050:12 to 0x8050:14).
Dithering
Dithering involves modulating a square wave signal on top of the actual output value. The modulated signal results in continuous movement of a valve piston, for example.
This reduces static friction and prevents sudden "breakaway" of the piston.
The configuration required for this depends a lot on the particular application.
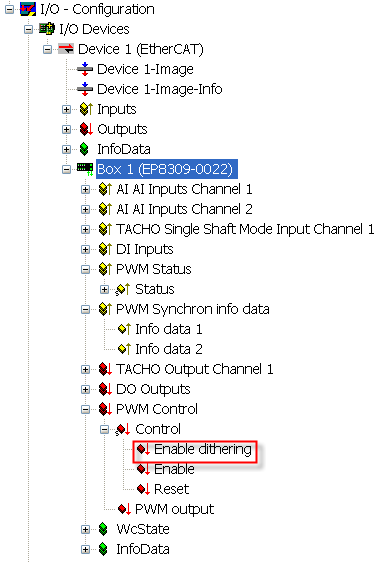
To activate dithering, the object 0x8050:03 ("Enable dithering") and the corresponding control bit must be set.
The following parameters can be set:
Value | Text | Description |
|---|---|---|
Dithering frequency [Hz] | Frequency of the applied dither in Hz | |
Dithering amplitude [%] | Amplitude of the applied dither (in % of the rated terminal current) |
The controller parameters themselves (Kp,Ki, and Kd) also play a role.
In the diagrams a dither of 10 % of the rated current is shown as 100 Hz.
The controller has 5 ms for compensating a current pulse of 10 %. The steepness of the current rise is limited by the controller parameters and the inductance.
The actual current should follow the set current. This is enabled through suitable settings of the controller and dither parameters (frequency and amplitude).
Green: Set current |
EP8309 100 Hz dither with 10 % amplitude, Green: Set current |
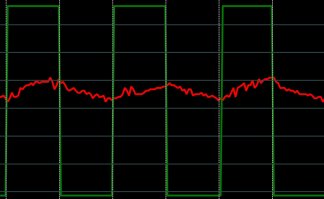 EP8309 100 Hz dither with 10 % amplitude,
EP8309 100 Hz dither with 10 % amplitude,