Touch Probe
(Master TwinCAT 2.11 R3)
Functional description
The touch probe function saves the current position of the motor when a signal edge is detected on a digital input.
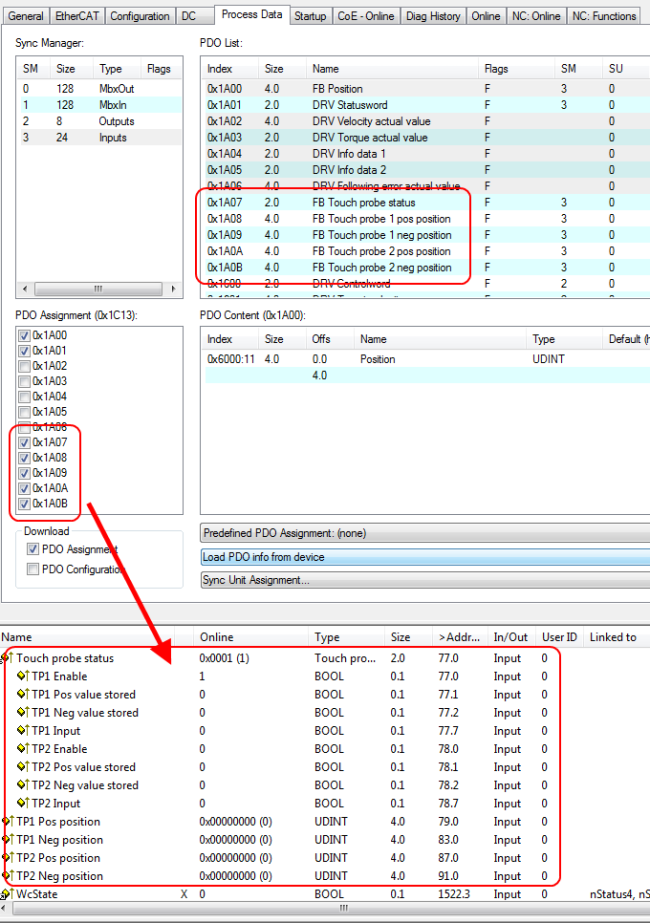
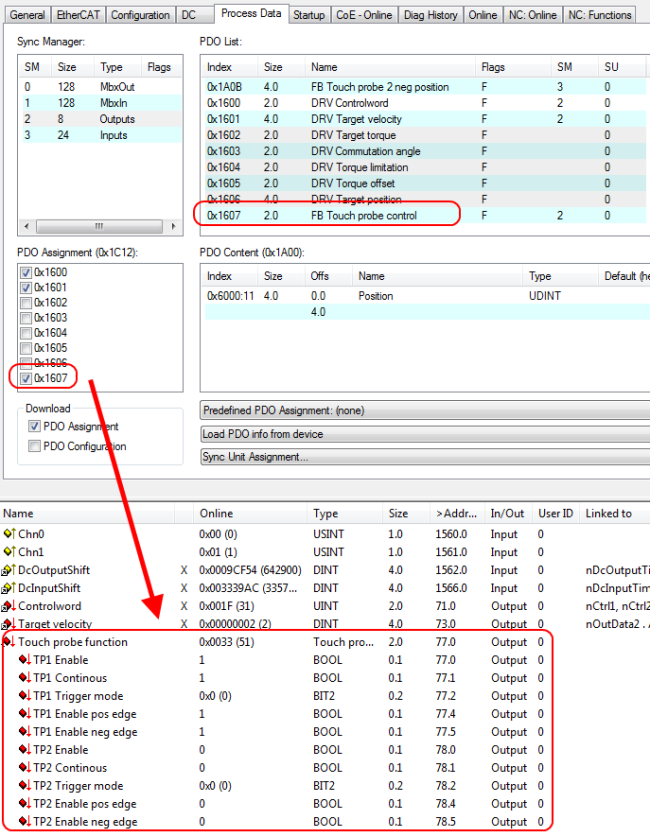
The process data objects required for this can be activated on the Process data tab (see figs. Touch Probe inputs and Touch Probe outputs).
Step-by-step
TP1 is used here as an example for the description of the function.
- TP1 Enable must be set to true in order to generally activate the Touch Probe function.
- Subsequently, you must decide whether the position is to be saved on a positive edge at input 1 (TP1 Enable pos edge = true), on a negative edge (TP1 Enable neg edge = true), or in both cases (both set to ‘true’).
- With TP1 Continuous you can decide whether the position is to be saved only at the first event (TP1 Continuous = false) or whether this should take place at every event (TP1 Continuous = true).
For example, if TP1 Continous and TP1 Enablepos edge are set, the position is saved on each positive edge at input 1 of the box.
If TP1 Enable neg edge is set and TP1 Continuous is not set, the position will only be saved on the first negative edge at input 1 of the box. If you wish to repeat this procedure, you must first deactivate TP1 Enable and then activate it again. Then the position is saved again on the first negative edge. - The TP1 Trigger mode has no function with the EP7211.
- The saved position of the positive edge can be read in the inputs of the process data under TP1 Pos position, that of the negative edge under TP1 Neg position.
- The variables under Touch probe status are for the diagnosis.
- The Touch Probe inputs must be addressed with a 1-wire +24 V signal.