Technology
Servomotor
The servomotor is an electrical motor. Together with a servo drive the servomotor forms a drive. The servomotor is operated in a closed control loop with position, torque or speed control.
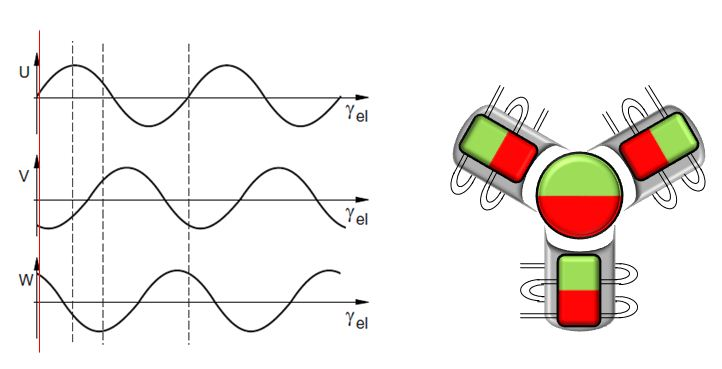
EP7211-003x supports control of permanent magnet synchronous motors. These consist of 3 coils which are offset by 120° and a permanent magnet rotor.
One Cable Technology (OCT)
In the servomotors from the AM8100-xF2 x series the feedback signals are transmitted directly via the power supply cable, so that power and feedback system are combined in a single motor connection cable. With the use of the One Cable technology, the information is sent reliably and without interference through a digital interface. Since a cable and plug are omitted at both the motor and controller end, the component and commissioning costs are reduced.
Thermal I²T motor model
The thermal I²T motor model represents the thermal behavior of the motor winding taking into account the absolute thermal resistance Rth and the thermal capacity Cth of motor and the stator winding.
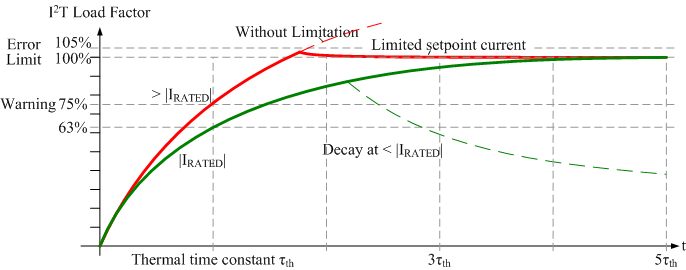
The model assumes that the motor reaches its maximum continuous operating temperature Tnom during continuous operation with rated current Inom. This temperature corresponds to 100% motor load. During operation at rated current the motor model reaches a load of 63% after a time of τth=Rth∙Cth and slowly reaches its continuous operating temperature.
If the motor is operated with a current that is greater than the rated current, the model reaches 100% load more quickly.
If the load of the I²T model exceeds 100%, the requested set current is limited to the rated current, in order to protect the motor winding thermally. The load reduces to a maximum of 100%. If the current falls below the rated current, the load falls below 100% and the set current limitation is cancelled.
For a motor that has been cooled to ambient temperature, the time for reaching 100% load with a set current that exceeds the rated current can be estimated with τth∙Inom²/Iactual².
The actual load must be known for exact calculation of the time when the 100% load threshold is exceeded.