EtherCAT subscriber configuration
In the left-hand window of the TwinCAT 2 System Manager or the Solution Explorer of the TwinCAT 3 Development Environment respectively, click on the element of the terminal within the tree you wish to configure (in the example: EL3751 Terminal 3).

In the right-hand window of the TwinCAT System Manager (TwinCAT 2) or the Development Environment (TwinCAT 3), various tabs are now available for configuring the terminal. And yet the dimension of complexity of a subscriber determines which tabs are provided. Thus as illustrated in the example above the terminal EL3751 provides many setup options and also a respective number of tabs are available. On the contrary by the terminal EL1004 for example the tabs “General”, “EtherCAT”, “Process Data” and “Online“ are available only. Several terminals, as for instance the EL6695 provide special functions by a tab with its own terminal name, so “EL6695” in this case. A specific tab “Settings” by terminals with a wide range of setup options will be provided also (e.g. EL3751).
“General” tab
Name | Name of the EtherCAT device |
Id | Number of the EtherCAT device |
Type | EtherCAT device type |
Comment | Here you can add a comment (e.g. regarding the system). |
Disabled | Here you can deactivate the EtherCAT device. |
Create symbols | Access to this EtherCAT slave via ADS is only available if this control box is activated. |
“EtherCAT” tab
Type | EtherCAT device type |
Product/Revision | Product and revision number of the EtherCAT device |
Auto Inc Addr. | Auto increment address of the EtherCAT device. The auto increment address can be used for addressing each EtherCAT device in the communication ring through its physical position. Auto increment addressing is used during the start-up phase when the EtherCAT master allocates addresses to the EtherCAT devices. With auto increment addressing the first EtherCAT slave in the ring has the address 0000hex. For each further slave the address is decremented by 1 (FFFFhex, FFFEhex etc.). |
EtherCAT Addr. | Fixed address of an EtherCAT slave. This address is allocated by the EtherCAT master during the start-up phase. Tick the control box to the left of the input field in order to modify the default value. |
Previous Port | Name and port of the EtherCAT device to which this device is connected. If it is possible to connect this device with another one without changing the order of the EtherCAT devices in the communication ring, then this combination field is activated and the EtherCAT device to which this device is to be connected can be selected. |
Advanced Settings | This button opens the dialogs for advanced settings. |
The link at the bottom of the tab points to the product page for this EtherCAT device on the web.
“Process Data” tab
Indicates the configuration of the process data. The input and output data of the EtherCAT slave are represented as CANopen process data objects (Process Data Objects, PDOs). The user can select a PDO via PDO assignment and modify the content of the individual PDO via this dialog, if the EtherCAT slave supports this function.
The process data (PDOs) transferred by an EtherCAT slave during each cycle are user data which the application expects to be updated cyclically or which are sent to the slave. To this end the EtherCAT master (Beckhoff TwinCAT) parameterizes each EtherCAT slave during the start-up phase to define which process data (size in bits/bytes, source location, transmission type) it wants to transfer to or from this slave. Incorrect configuration can prevent successful start-up of the slave.
For Beckhoff EtherCAT EL, ES, EM, EJ and EP slaves the following applies in general:
- The input/output process data supported by the device are defined by the manufacturer in the ESI/XML description. The TwinCAT EtherCAT Master uses the ESI description to configure the slave correctly.
- The process data can be modified in the System Manager. See the device documentation.
Examples of modifications include: mask out a channel, displaying additional cyclic information, 16-bit display instead of 8-bit data size, etc. - In so-called “intelligent” EtherCAT devices the process data information is also stored in the CoE directory. Any changes in the CoE directory that lead to different PDO settings prevent successful startup of the slave. It is not advisable to deviate from the designated process data, because the device firmware (if available) is adapted to these PDO combinations.
If the device documentation allows modification of process data, proceed as follows (see Figure Configuring the process data).
- A: select the device to configure
- B: in the “Process Data” tab select Input or Output under SyncManager (C)
- D: the PDOs can be selected or deselected
- H: the new process data are visible as linkable variables in the System Manager
The new process data are active once the configuration has been activated and TwinCAT has been restarted (or the EtherCAT master has been restarted) - E: if a slave supports this, Input and Output PDO can be modified simultaneously by selecting a so-called PDO record (“predefined PDO settings”).
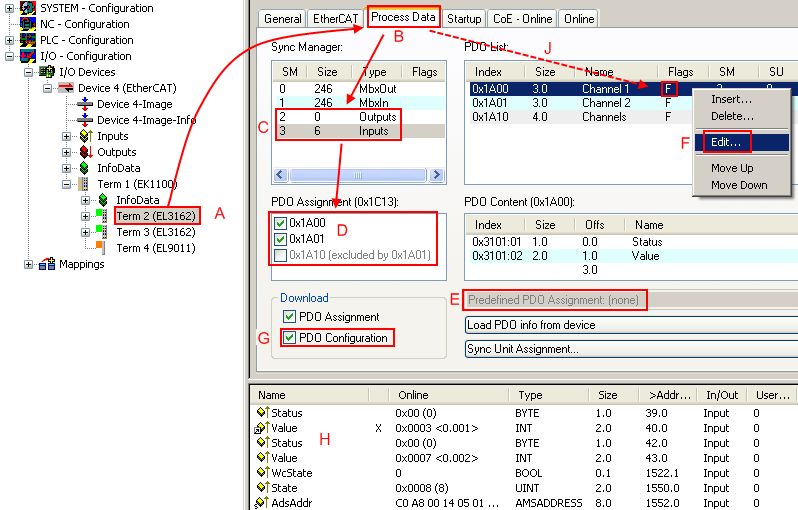
 | Manual modification of the process data According to the ESI description, a PDO can be identified as “fixed” with the flag “F” in the PDO overview (Fig. Configuring the process data, J). The configuration of such PDOs cannot be changed, even if TwinCAT offers the associated dialog (“Edit”). In particular, CoE content cannot be displayed as cyclic process data. This generally also applies in cases where a device supports download of the PDO configuration, “G”. In case of incorrect configuration the EtherCAT slave usually refuses to start and change to OP state. The System Manager displays an “invalid SM cfg” logger message: This error message (“invalid SM IN cfg” or “invalid SM OUT cfg”) also indicates the reason for the failed start. |
A detailed description can be found at the end of this section.
“Startup” tab
The Startup tab is displayed if the EtherCAT slave has a mailbox and supports the CANopen over EtherCAT (CoE) or Servo drive over EtherCAT protocol. This tab indicates which download requests are sent to the mailbox during startup. It is also possible to add new mailbox requests to the list display. The download requests are sent to the slave in the same order as they are shown in the list.
Column | Description |
|---|---|
Transition | Transition to which the request is sent. This can either be
If the transition is enclosed in “<>” (e.g. <PS>), the mailbox request is fixed and cannot be modified or deleted by the user. |
Protocol | Type of mailbox protocol |
Index | Index of the object |
Data | Date on which this object is to be downloaded. |
Comment | Description of the request to be sent to the mailbox |
Move Up | This button moves the selected request up by one position in the list. |
Move Down | This button moves the selected request down by one position in the list. |
New | This button adds a new mailbox download request to be sent during startup. |
Delete | This button deletes the selected entry. |
Edit | This button edits an existing request. |
“CoE - Online” tab
The additional CoE - Online tab is displayed if the EtherCAT slave supports the CANopen over EtherCAT (CoE) protocol. This dialog lists the content of the object list of the slave (SDO upload) and enables the user to modify the content of an object from this list. Details for the objects of the individual EtherCAT devices can be found in the device-specific object descriptions.
Object list display
Column | Description | |
|---|---|---|
Index | Index and sub-index of the object | |
Name | Name of the object | |
Flags | RW | The object can be read, and data can be written to the object (read/write) |
RO | The object can be read, but no data can be written to the object (read only) | |
P | An additional P identifies the object as a process data object. | |
Value | Value of the object | |
Update List | The Update list button updates all objects in the displayed list |
Auto Update | If this check box is selected, the content of the objects is updated automatically. |
Advanced | The Advanced button opens the Advanced Settings dialog. Here you can specify which objects are displayed in the list. |
Online - via SDO Information | If this option button is selected, the list of the objects included in the object list of the slave is uploaded from the slave via SDO information. The list below can be used to specify which object types are to be uploaded. |
Offline - via EDS File | If this option button is selected, the list of the objects included in the object list is read from an EDS file provided by the user. |
“Online” tab
State Machine
Init | This button attempts to set the EtherCAT device to the Init state. |
Pre-Op | This button attempts to set the EtherCAT device to the pre-operational state. |
Op | This button attempts to set the EtherCAT device to the operational state. |
Bootstrap | This button attempts to set the EtherCAT device to the Bootstrap state. |
Safe-Op | This button attempts to set the EtherCAT device to the safe-operational state. |
Clear Error | This button attempts to delete the fault display. If an EtherCAT slave fails during change of state it sets an error flag. Example: An EtherCAT slave is in PREOP state (pre-operational). The master now requests the SAFEOP state (safe-operational). If the slave fails during change of state it sets the error flag. The current state is now displayed as ERR PREOP. When the Clear Error button is pressed the error flag is cleared, and the current state is displayed as PREOP again. |
Current State | Indicates the current state of the EtherCAT device. |
Requested State | Indicates the state requested for the EtherCAT device. |
DLL Status
Indicates the DLL status (data link layer status) of the individual ports of the EtherCAT slave. The DLL status can have four different states:
Status | Description |
|---|---|
No Carrier / Open | No carrier signal is available at the port, but the port is open. |
No Carrier / Closed | No carrier signal is available at the port, and the port is closed. |
Carrier / Open | A carrier signal is available at the port, and the port is open. |
Carrier / Closed | A carrier signal is available at the port, but the port is closed. |
File Access over EtherCAT
Download | With this button a file can be written to the EtherCAT device. |
Upload | With this button a file can be read from the EtherCAT device. |
“DC” tab (Distributed Clocks)
Operation Mode | Options (optional):
|
Advanced Settings… | Advanced settings for readjustment of the real time determinant TwinCAT-clock |
Detailed information to Distributed Clocks is specified on http://infosys.beckhoff.com:
Fieldbus Components → EtherCAT Terminals → EtherCAT System documentation → EtherCAT basics → Distributed Clocks