EKxxxx - Optional Distributed Clocks support
Basic principles Distributed Clocks (DC)
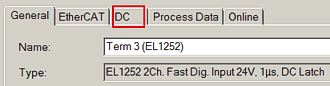
The EtherCAT Distributed Clocks system comprises local clocks that are integrated in the EtherCAT slaves and are synchronized by the EtherCAT master via special datagrams. Not all EtherCAT slaves support the Distributed Clocks procedure. It is only supported by slaves whose function requires it. In the TwinCAT System Manager a slave indicates its DC capability by showing “DC” in the settings dialog.
Once of these local clocks is the reference clock, based on which all other clocks are synchronized. See also explanatory notes in the Basic EtherCAT documentation. The reference clock must be the first DC-capable EtherCAT slave. By default TwinCAT therefore selects the first DC-capable device as reference clock. This is shown (and can be modified by the user) under advanced properties of the EtherCAT master. The standard setting should not be changed, except in cases where external synchronization is recommended in the relevant documentation, for example.
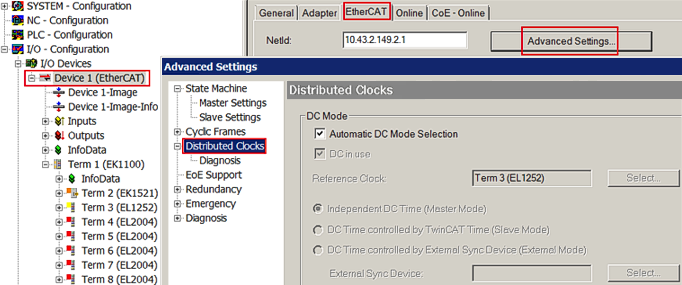
The figure shows how TwinCAT selects the EL1252 as reference clock by default, since the preceding components do not support DC.
Settings EtherCAT device
System and infrastructure devices such as EK1100 or EK1122 couplers and junction etc. do not require Distributed Clocks to function properly. Nevertheless, it may be topologically expedient to designate the first coupler in an EtherCAT system as reference clock, for example. For this reason, from a certain level the infrastructure components are able to operate as reference clocks, based on special configuration settings.
According to the following table (DC support from rev/firmware version), the components support activation of distributed clocks:
Device | XML revision in the configuration | Serial number of the component |
|---|---|---|
BK1150 | from BK1150-0000-0016 | from firmware 01: xxxx01yy |
CU1128 | from CU1128-0000-0000 | from firmware 00: xxxx00yy |
EK1100 | from EK1100-0000-0017 | from firmware 06: xxxx06yy |
EK1101 | from EK1101-0000-0017 | from firmware 01: xxxx01yy |
EK1501 | from EK1501-0000-0017 | from firmware 01: xxxx01yy |
EK1501-0010 | from EK1501-0010-0017 | from firmware 02: xxxx02yy |
EK1122 | from EK1122-0000-0017 | from firmware 01: xxxx02yy |
EK1521 | from EK1521-0000-0018 | from firmware 03: xxxx03yy |
EK1541 | from EK1541-0000-0016 | from firmware 01: xxxx01yy |
EK1561 | from EK1561-0000-0016 | from firmware 01: xxxx01yy |
EK1521-0010 | from EK1521-0010-0018 | from firmware 03: xxxx03yy |
EK1814 | from EK1814-0000-0016 | from firmware 00: xxxx00yy |
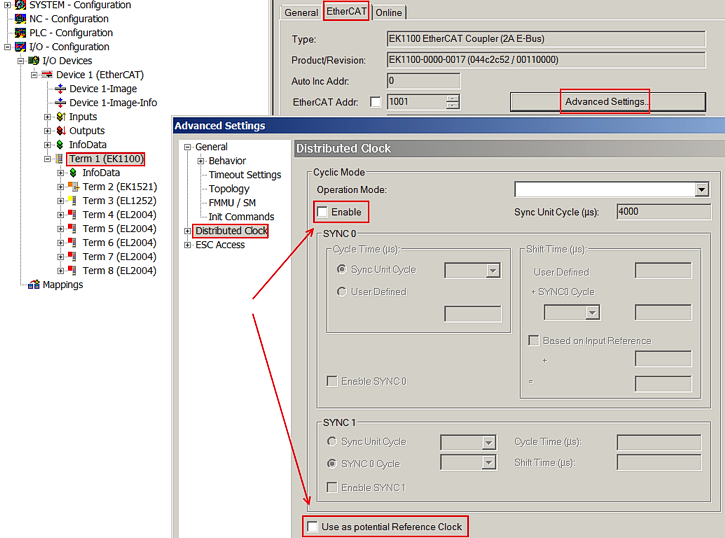
To ensure that TwinCAT uses such a component as DC reference clock, a manual intervention during the configuration setup is required, as shown here using the EK1100 as an example.
The checkboxes “Cyclic Mode Enable” and “Use as potential Reference Clock” must be set.
 | Activation of Distributed Clocks support The (synchronization) procedure described here is only successful for the components described above. The checkboxes can be set for other components, too, although the hardware does not support this function, unless specified in the respective documentation. In particularly, please note that after commissioning the component may not be replaced with a previous version without DC support. |