MC_BufferMode
Dieser Datentyp wird mit verschiedenen Funktionsbausteinen der Motion-Control-Bibliothek verwendet. Über BufferMode wird festgelegt, wie aufeinanderfolgende Bewegungskommandos abgearbeitet werden sollen.
TYPE MC_BufferMode :
(
MC_Aborting,
MC_Buffered,
MC_BlendingLow,
MC_BlendingPrevious,
MC_BlendingNext,
MC_BlendingHigh
);
END_TYPE
 | Um den BufferMode zu verwenden, ist immer ein zweiter Funktionsbaustein nötigt. Es ist nicht möglich, einen Move-Baustein mit neuen Parametern zu triggern, während er noch aktiv ist. |
Siehe auch: Allgemeine Regeln für MC-Funktionsbausteine
Beispiele:
Im folgenden Beispiel wird eine Achse mit zwei Move-Kommandos zunächst von Position P0 auf P1 und anschließend auf P2 gefahren. Das zweite Kommando wird während der Fahrt nach P1 aber noch vor der Bremsrampe mit verschieden BufferModes beauftragt. Bezugspunkt für die verschiedenen Geschwindigkeitsprofile ist in jedem Fall P1. Der Mode legt die Geschwindigkeit v1 oder v2 in diesem Punkt fest.
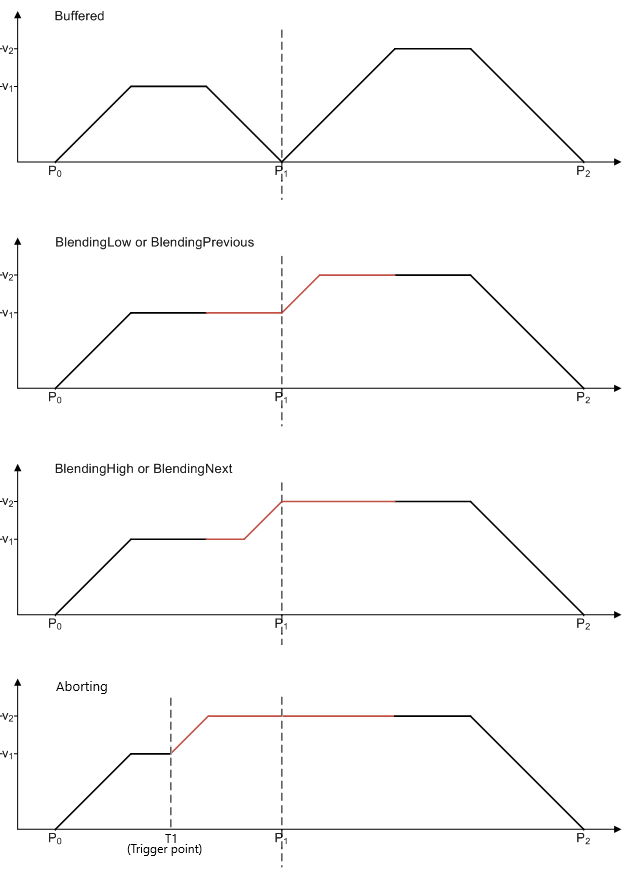
Da die Geschwindkeit des ersten Kommandos niedriger ist als die des zweiten, führen die Modes BlendingLow und BlendingPrevious bzw. die Modes BlendingHigh und BlendingNext jeweils zum selben Ergebnis.
Das nächste Beispiel unterscheidet sich dadurch, dass die Geschwindigkeit des zweiten Kommandos niedriger ist als die des ersten Kommandos. Hier sind nun die Modes BlendingLow und BlendingNext bzw. die Modes BlendingHigh und BlendingPrevious jeweils gleichwertig.
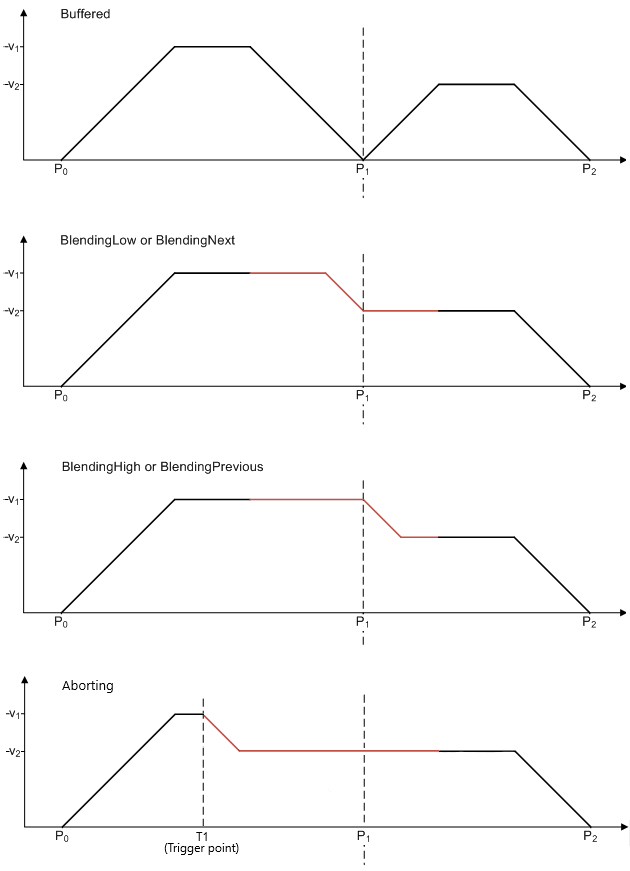
Die gezeigten Geschwindigkeitsprofile setzen voraus, dass das nachfolgende Kommando rechtzeitig, also noch vor der Bremsrampe des ersten Kommandos beauftragt wird. Anderenfalls wird das Blending bestmöglich umgesetzt.
Voraussetzungen
Entwicklungsumgebung | Zielplattform | Einzubindende SPS-Bibliotheken |
|---|---|---|
TwinCAT v3.0.0 | PC oder CX (x86 oder x64) | Tc2_MC2 |