Analogtechnische Hinweise ‑ dynamische Signale
In diesem Kapitel wird auf die Problematik der Messung/Erfassung von realen analogen elektrischen Signalen aus dem industriellen Automatisierungsumfeld eingegangen. Solche Signale werden von Sensoren erzeugt und von Automatisierungskomponenten gemessen. Mit diesen Informationen nimmt die (softwarebasierte) Steuerung die physikalische Anlagenrealität wahr und leitet daraus Folgeaktionen ab.
Die Signale werden elektrisch geformt und analog gemessen als
- Signale über Industrie-Schnittstellen 10V, 20mA, …
- Signale aus dem Sensor direkt: Spannung einer Batterie [V], Brückensignal [mV/V], Strommessung [A], Widerstand [Ω]…
Signale die nicht elektrisch gemessen werden müssen, sondern schon virtuell in der Steuerung vorliegen, können auch mit den u.a. Werkzeugen analysiert werden, stehen aber nicht im Fokus dieses Dokuments.
Einführung
Dieses Kapitel soll insbesondere auf die üblichen „Umstände“ von echten analogen Sensorsignalen im industriellen Umfeld eingehen, die „über Zeit“ betrachtet werden und in ihrem Verlauf eine Information hin zur Steuerung übertragen in der
- Amplitude oder Signalhöhe, auch „Signal ist da“, „Signal ist nicht da“
- Frequenz oder
- Mischung davon
Das bedeutet praktisch an realen Beispielen
- Die Signale sind „konstant“ → Batteriemessung (aber nur unbelastet)
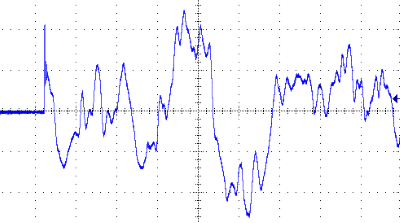
- Oder verändern sich ständig, unvorhersehbar, z.B.:
(Wiegevorgang im Durchlauf)
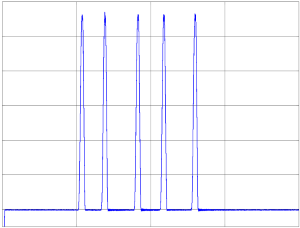
(Anregung eines Magnetventils) - In den allermeisten Fällen sind sie nicht gleichbleibend zyklisch „deterministisch“, wie z.B. ein 1kHz Sinus aus einem Frequenzgenerator, sondern haben Pausen, und ändern ihre Frequenz, sie sind „stochastisch“, z.B.:
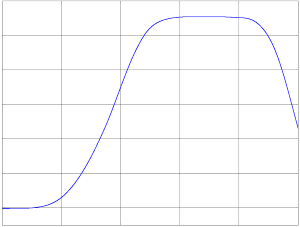
(Anregung eines Magnetventils) - Sind manchmal sehr steilflankig:
- Oder auch nicht:
- Sie sind nie „ideal“ sondern unterliegen Störungen, Einstreuungen, Dämpfungen:
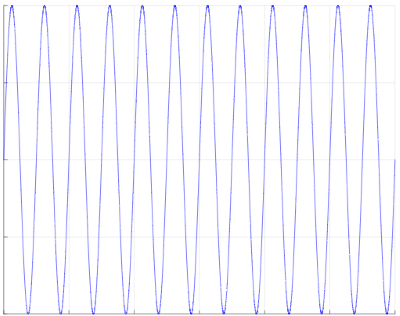
- Sind überlagert - dem Anschein nach liegen hier zwei überlagerte Sinus-Signale vor:
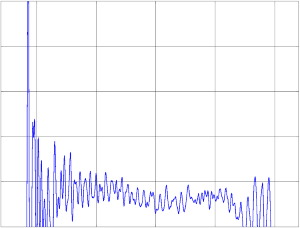
- Und wenn viele Frequenzen im Spiel sind auch so:
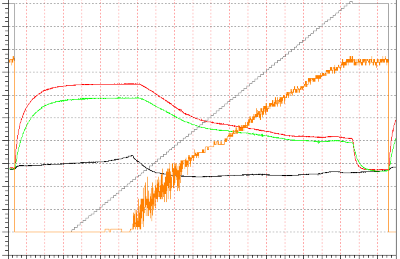
(der Beginn eines Liedes, am Lautsprecher gemessen) - Sie verändern sich über Zeit, Temperatur, Feuchte, Einbaulage etc.:
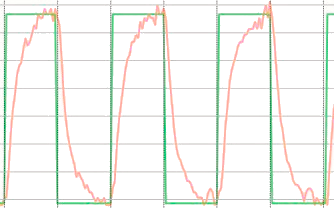
- Und aus einem gewünschten Rechtecksignal (grün) wird schnell auf der Leitung etwas anderes (rot):
- Und manchmal kommt alles zusammen und es stellt sich die Frage „wie lautet der Messwert“?
- Auf jeden Fall schauen sie selten so ideal und zyklisch aus:
Hinweis | |
Die Zeitachse ist relativ In den o.a. Beispielen ist absichtlich die x/Zeitachse nicht beschriftet – ob ein Signal schnell/langsam, flach/steilflankig ist hängt „nur“ von der Bewertung gegen die gestellte Anforderung und den Mess-Moment ab: bei einem mechanischen Zugversuch als Zerreißprobe ändert sich das Signal lange Zeit nur wenig, bis beim Bruch dann auf einmal sehr steile Signaländerungen im µs-Bereich beobachtet werden |
Obwohl „echte“ industrielle Signale eben nicht dauerhaft gleichförmig ideal und sinusförmig sind, ist es hilfreich sich der Begriffe und Werkzeuge der theoretischen Signalanalyse zu bedienen, um Effekte zu charakterisieren und die Wirksamkeit von Maßnahmen zu prüfen. Schlagworte wie „Signalfrequenz“, „Flankensteilheit“, „Dämpfung“ und ähnliche sind dann eben abschnittsweise auf das reale Signal anzuwenden.
Dieses Kapitel betrachtet deshalb die umfassenden theoretischen Grundlagen der Signaltheorie (die gerne unter www.wikipedia.com und in Standardwerken nachgelesen werden können) durch die Brille des industriellen Automatisierers, und konzentriert sich auf
- Signalgrößen µV..kV, entsprechend Ampere,
 etc.,
etc., - Signalfrequenzen 0 Hz bis ~1 MHz,
- Nicht-konstante Signale,
- die nicht ideal sind.
Weg in die Praxis
Analoge Geräte können wie folgt messen, Reihenfolge nach aufsteigender Komplexität:
- Statische elektrische Größen die sich nicht über „kurze“ Zeit verändern: Gleichspannung oder Gleichstrom, allgemein eine Gleichgröße, kurz „DC“ (direct current). Diese liegt z.B. als Ausgangsspannung einer unbelasteten Batterie vor.
Hinweis: „kurz“ ist ein sehr subjektiver Begriff der absolut von der Problemstellung abhängt - Dynamische elektrische Größen die sich über Zeit verändern: Wechselspannung oder Wechselstrom, allgemein eine Wechselgröße, kurz „AC“ (alternative current). Es ist eine sich mit einer bestimmten Periode wiederholenden Signalform. Diese liegt z.B. am deutschen Stromnetz mit einer Sinussignalform von 50 Hz vor oder zeigt sich als „schnell“ ändernde Messgrößen an Maschinen. Der Kehrwert der Periodendauer ist die Frequenz f; Einheit Hz. Der Maximalwert wird u.a. als Amplitude bezeichnet und kann sich auf dem Strom‑ oder dem Spannungswert beziehen. Für den ersten Ansatz sei es ein sich ständig wiederholendes, ein periodisches/deterministisches Signal.
- Mischsignale: Diese sind eine „Mischform“ mehrere Wechselgrößen, die miteinander überlagert sind. Hierbei liegt ein Spannung‑ oder Stromsignal vor, in dem mehrere Wechselgrößen unterschiedlicher Frequenz und unterschiedlicher Amplitude vorliegen und kann auch zusätzlich eine Gleichspannung beinhalten, was mit „Gleichanteil“ oder „Offset“ bezeichnet wird. Auch hier seien für den ersten Ansatz sich ständig wiederholende, periodische/deterministische Signale gewählt
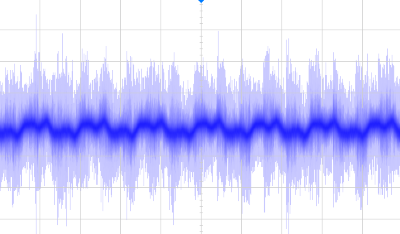
- Und wenn die Signale sich jetzt auch noch in ihrer Frequenz/Amplitude ändern, sog. nicht-deterministische/stochastische (zufällige) Signale, treffen wir endlich auf die reale Kabelwirklichkeit.
Als ein besonders zutreffendes Signal hierfür wäre ein „Rauschsignal“.
Beachtet werden sollte, dass die „tatsächlich“ in Erscheinung tretenden Signale, die „realen“ Signale mehr oder weniger Mischsignale sind, weil elektronische Komponenten einer Übertragungsstrecke immer „Verlustbehaftet“ sind und eine „reine“ Signalform zumeist verzerren. Ideale Signale sind theoretische Größen, bei denen keine Verluste berücksichtigt sind. Daher wird ein Signal in dem als real auftretendes Mischsignal u.a. durch seine höchste Amplitude A und seine tiefste vorhandene Frequenz, der Grundfrequenz spezifiziert.
Ferner gilt zusätzlich, dass die Konstanz einer Frequenz in realen Umgebungen meistens aufgrund von physikalischen Gegebenheiten ebenfalls nicht möglich ist. Es ist i.d.R. recht aufwändig, ein Schwingungserzeugendes System zu erschaffen, dass nahezu keinen zeitlichen Frequenzänderungen unterworfen ist.
Im Folgenden soll erklärt werden, was grundlegend zu beachten ist, wenn dynamische Signale mit analogen Geräten gemessen werden.
Signaltheorie
Die angegebenen Grundgenauigkeiten in der Beckhoff‑IO‑Dokumentation gelten im Allgemeinen für statische (DC‑) Signale, wenn nicht anders angegeben. Bei der Ermittlung der Spezifikation wird dazu ein DC‑Signal angelegt und eine Messung wird erst dann durchgeführt, wenn das ganze Messsystem vollständig eingeschwungen ist und der Messwert sich in „kurzer“ Zeit nicht mehr ändert. Die verbleibende Abweichung ∆GDC wird im Produktionsabgleich versucht zu minimieren.
Aufgrund der Verluste und Trägheit von Widerständen, Induktivitäten und Kapazitäten in Verstärkern einer elektrischen Eingangsschaltung sowie endlichen Berechnungszeiten durch digitale Signalverarbeitungsblöcken, benötigt das Einschwingen eine bestimmte Zeit (auch als Einschwingzeit bekannt). Je nach Aufbau kann das ns bis hin zu einigen Sekunden dauern. Nebenbemerkung: Wenn das thermische Einschwingen der Geräte/Leitungen auch noch beachtet werden muss, kann es sogar viele Minuten dauern.
Wird dagegen ein dynamisches, zeitabhängiges (AC‑) Signal gemessen, kann sich das Messsystem nie vollständig stationär einschwingen, weil sich das Signal ständig verändert und die Änderungsrate des AC‑Signals größer ist als die Einschwingzeit des Systems. Dadurch entsteht eine zusätzliche frequenzabhängige Abweichung, die nicht durch die DC‑Spezifikation ∆GDC abgedeckt ist. Ist das dynamische Signal beispielsweise eine Sinuswelle
S(t)=A∙sin(2∙fSignal∙f∙t),
mit der Amplitude A so kann die zusätzliche Abweichung als Gain‑Abweichung ∆GAC dargestellt werden. Faktisch bedeutet dass, das Agemessen ≠ ASignal sein wird, wobei nicht nur Dämpfung Agemessen < ASignal sondern auch unbeabsichtigt, die Verstärkung Agemessen > ASignal möglich sein kann. Die gesamte Gain‑Abweichung ergibt sich dann zu
∆Gges = ∆GAC + ∆GDC (frequenzabhängig)
mit ∆GAC der zusätzlichen Gain‑Abweichung durch das Wechselsignal.
Im Folgenden wird ein reales Signal betrachtet, dessen Signalzusammensetzung (Grundfrequenz, Rauschen, überlagerte Störungen) sich zwar ständig ändert, bezüglich dessen Frequenz jedoch von einem idealen Fall ausgegangen wird und diese (f = const.) konstant sei.
Hinweis: da diese Methodik im AC-Bereich historisch ihren Hintergrund in der Signalübertragung hat, wird hier mit entsprechenden Begriffen gearbeitet: Gain/Verstärkung, dB, Dämpfung… Das führt dann wie später beschrieben oft zu üblichen Aussagen in logarithmischer [dB]‑Darstellung, die für eine niederfrequente [ppm]‑Beurteilung umgerechnet werden müssen.
Der Frequenzgang in dB und ppm
Diese frequenzabhängige Abweichung kann als sog. Frequenzgang dargestellt werden. Der Frequenzgang beschreibt das Verhältnis des Ausgangssignals zu dem Eingangssignal bezüglich der Amplitude und der Phase für einen bestimmten Frequenzbereich.
In vielen Applikationen ist die Phasenverschiebung nicht relevant und wird daher oft nicht mit angezeigt. Es sollte dennoch in Erwägung gezogen werden, dass nicht nur die Amplitude des Ausgangssignals sich über die Frequenz verändern kann, sondern auch die Phase des Ausgangssignals relativ zum Eingangssignal.
Bei einem Graphen eines Frequenzgangs wird immer über die x‑Achse die Frequenz fSignal dargestellt. Auf der y‑Achse wird das Amplitudenverhältnis entweder linear oder logarithmisch skaliert (vorzugsweise in der Einheit dB ~ Dezibel) dargestellt. Je nach Auswerteziel zeigt die lineare oder logarithmische Skalierung bestimmte Eigenschaften besser auf. Zu betonen ist, dass die Skalierung (linear/logarithmisch) von der Einheit (Hz, ppm, dB) unabhängig ist!
Skalierung Varianten | x-Achse / Frequenz | ||
Linear in [Hz] | Logarithmisch (dann gerne in [dB] ) | ||
y-Achse Messunsicherheit, Dämpfung | Linear | Hilfreich bei Genauigkeitsbetrachtung im ppm-Bereich | Unüblich, bei ansteigender Frequenz wird Dämpfung nicht mehr klar gezeigt
|
Logarithmisch (dann gerne als Dämpfung in [dB] ) | Wenig hilfreich der untere Frequenzbereich schlecht aufgelöst wird | Üblich bei dB-Darstellung
| |
Die Einheit dB (Dezibel, 1/10 Bel) wird verwendet, um Verhältnisse zweier Werte zueinander zu beschreiben. Sie ist selbst einheitenlos! Dabei ist ein dB für zwei Leistungen P1 und P2 definiert durch folgende Gleichung
Mittels dieser Darstellungsmethode lässt sich z.B. in einer Systemkette mit Verstärkung‑ und Dämpfungselementen ein Gesamtwert einfach durch Addition und Subtraktion anstelle von Multiplikation und Division der Einzelwerte ermitteln.
Aus allgemein P = U · I ergibt sich zusammen mit dem ohmschen Gesetz für die beiden elektrischen Leistungswerte am gleichen Widerstand ein Quadratisches Verhältnis sowohl für die beiden Ströme I1 und I2 als auch der beiden Spannungen U1 und U2:
|
|
|


Übertragen auf das Verhältnis beider Leistungen P1 und P2:
|
|
|


Das Quadrat kann vor dem Logarithmus geschrieben werden und somit ergibt sich allgemein für zwei Amplituden A1 und A2 folgende Gleichung:
In diesem Zusammenhang ist es hilfreich sich folgende Umwandlungen von dB und Amplitudenverhältnissen zu merken:
[dB] | [A2/A1] |
|---|---|
40 | 100 |
20 | 10 |
3 | 1,414 |
0 | 1 |
-3 | 0,707 |
-20 | 0,1 |
-40 | 0,01 |
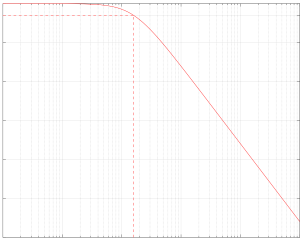
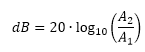
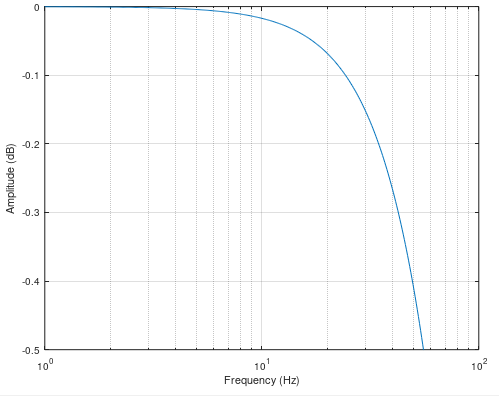
Folgende Abbildung zeigt den doppelt‑logarithmischen Amplitudengang einer „idealen“, d.h. „berechneten“ RC‑Schaltung mit R = 1 MΩ und C = 1 nF als Tiefpass ausgeführt. Sowohl Amplitude als auch Frequenz sind logarithmisch dargestellt:
Das Eingangssignal wird bis zur gestrichelt markierten Frequenz (fSignal ≈ 159 Hz, Amplitudenverhältnis bei ‑3 dB, 102=100!) fast ohne Dämpfung durchgelassen. Oberhalb = rechts von dieser Frequenz (offensichtlich sogar schon etwas vorher) fängt die Schaltung an das Eingangssignal merklich zu dämpfen. Die markierte Frequenz trennt per Definition zwei Bereiche mit unterschiedlichem Verhalten. Sie wird daher auch als Grenzfrequenz fc (auf Englisch cutoff frequency fc für Eck‑Frequenz) bezeichnet.
Je nach Problemhintergrund gibt es verschiedene Kennwerte um Amplituden‑Frequenzgänge zu beschreiben. Der ‑3dB‑Punkt ist ein möglicher Kennwert und wird gerne bei analogen RC‑Filtern oder analogen/digitalen Butterworth‑Filtern angesetzt.
Der Graph lässt vermuten, dass bis zu f = 20 Hz die Amplitude komplett ohne Dämpfung durchgelassen wird, dem ist aber nicht so. Die Skalierung der dB‑Darstellung über einen großen Frequenzbereich verschleiert wie eine Betrachtung aus weiter Ferne die Tatsache dass mikroskopisch gesehen in % = 1/100 oder ppm = 1/1000000 = 10‑6 Auflösung sehr wohl eine Dämpfung stattfindet. Und dies wird gerade dann interessant, wenn es um analoge Messmodule geht, die mit einer Grundgenauigkeit im ppm-Bereich spezifiziert sind.
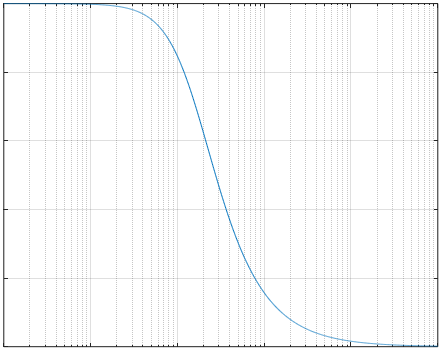
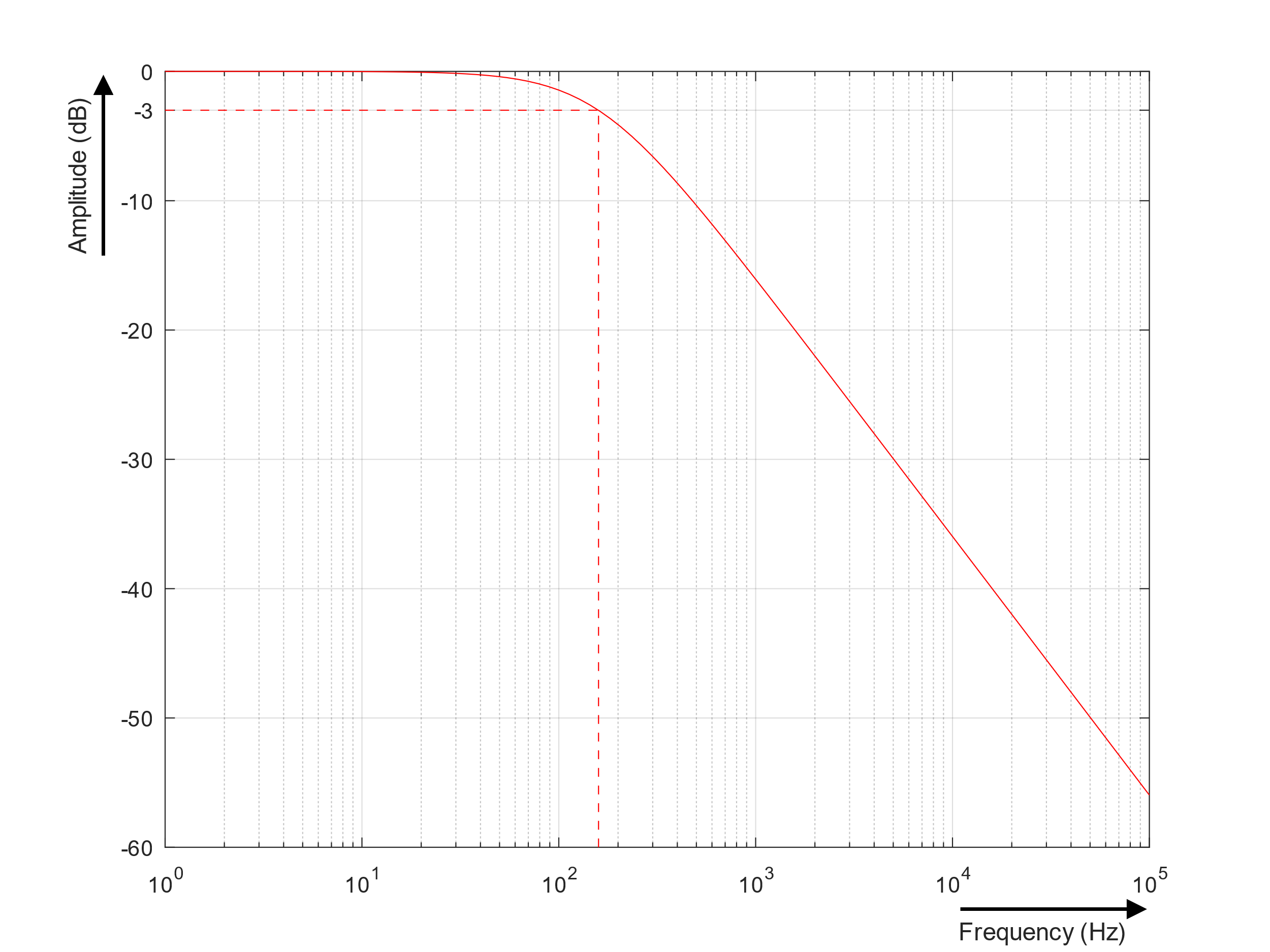
Die nächste Abbildung zeigt die gleiche relative Dämpfung, aber in ppm. Es ist eine doppelt‑lineare Darstellungsweise des Amplitudengangs der RC‑Schaltung:
Der Graph zeigt, dass schon bei 10 Hz die Ausgangsamplitude um 1968 ppm bezogen auf die Eingangsamplitude kleiner ist ‑ faktisch eine Messabweichung. Da konkret bekannt, kann das sogar als Messfehler bezeichnet werden.
Wir greifen also aus der o.a. Tabelle den für messtechnische Geräte interessanten kleinen Dämpfungsbereich mit einigen Beispielwerten heraus:
dB vs. ppm | ||
|---|---|---|
[dB] | [%] | [ppm] |
-0,001 | 0,01 | 115 |
-0,005 | 0,06 | 575 |
-0,01 | 0,12 | 1151 |
-0,02 | 0,23 | 2300 |
-0,04 | 0,46 | 4595 |
-0,08 | 0,92 | 9168 |
-0,2 | 2,28 | 22763 |
-0,4 | 4,5 | 45007 |
-0,8 | 8,8 | 87989 |
-1,6 | 16,82 | 168236 |
-3 | 29,21 | 292054 |
Eine Dämpfung von ‑3 dB bedeuten also fast 30%MBE oder fast 300.000 ppmMBE Amplitudenfehler! Und messtechnische Zielgenauigkeiten von 0,1% entsprechen etwa 0,01 dB. Das klingt zu Recht dramatisch und geht bei der gewohnten logarithmischen dB-Darstellung unter.
Das „Problem“ der dB-Darstellung liegt aber vor allem daran, dass sich eine dB-Darstellung üblicherweise über mehrere Hz-Größenordnungen erstreckt – gerade um die hohen Dämpfungen darzustellen und lineares Verhalten über weite Frequenzbereiche aufzuzeigen.
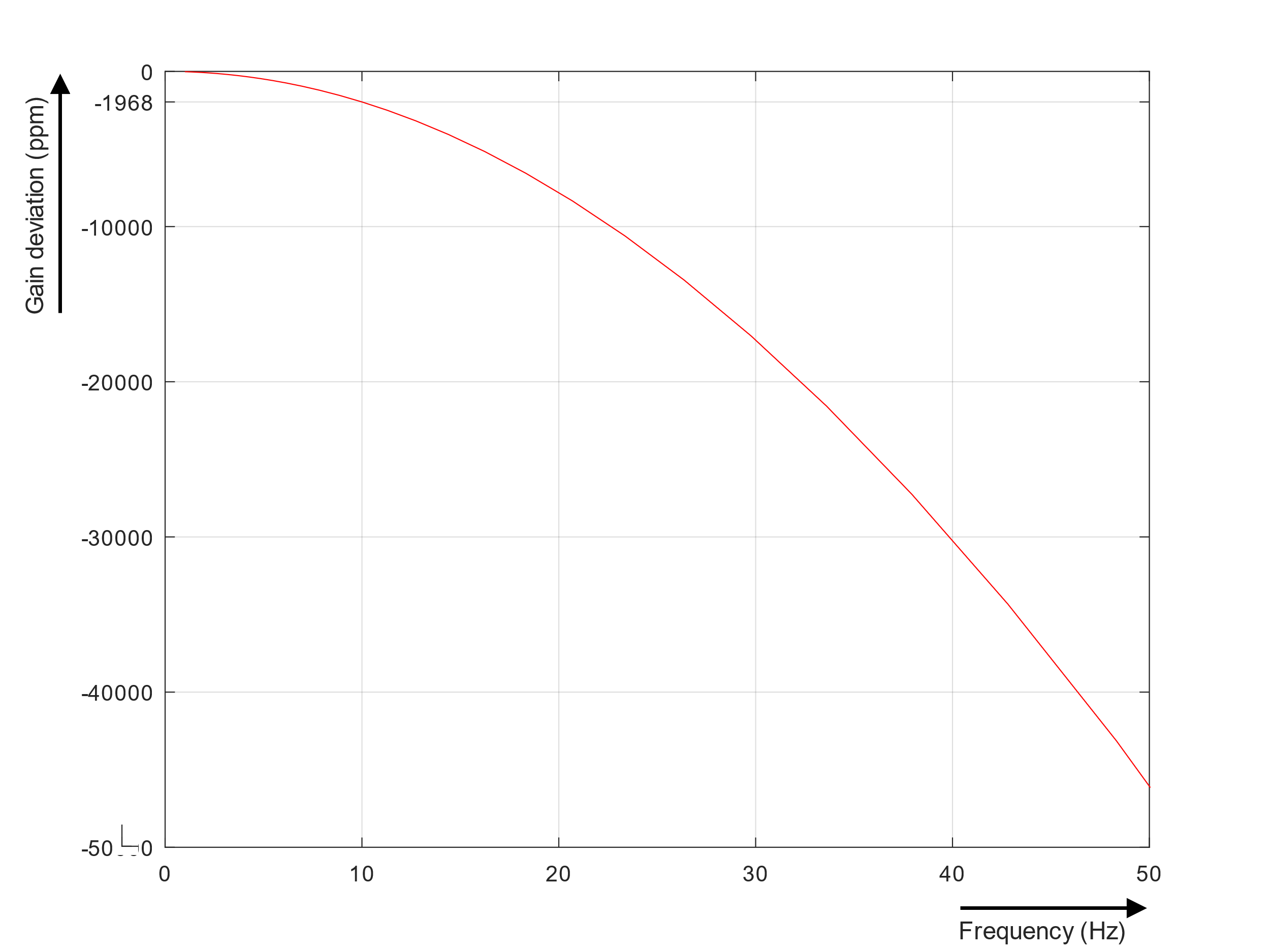
Wird in die dB-Darstellung „hineingezoomt“ und nur tiefer‑frequente Teile betrachtet, ist die Aussagekraft schon deutlich besser:
Bevor wir aber die Auswirkung des Frequenzgangs konkret auf Analogeingänge betrachten, müssen wir noch weitere Phänomene beleuchten.
Filter sind überall
Die zuvor beschriebene „Manipulation“ des Frequenzgangs vollzieht sich durch sog. Filter entlang der Signalverarbeitung
- unvermeidbar in allen elektrischen = analogen Elementen
- beeinflussbar in den digitalen = Software‑Elementen
Filter können nach ihrer Anwendung und nach ihrer Implementierung unterteilt werden. Zum einem werden Filter verwendet, um das Signal im Zeitbereich zu beeinflussen oder zu verändern, zum Beispiel um Signale zu glätten oder den DC‑Anteil zu entfernen. Frequenzselektierende Filter möchten bestimmte Frequenzbänder voneinander trennen. Das voran gegangene Beispiel mit der RC‑Schaltung ist ein Tiefpassfilter, bei welchem tiefe Frequenzen fast ungedämpft durchgelassen werden und höhere Frequenzen stark gedämpft werden. Neben Tiefpassfiltern gibt es noch andere Filterarten wie Hochpass‑Filter, Bandpass‑Filter und Bandstop‑Filter. Für andere Anwendungen, die nicht in diese Kategorien passen oder kompliziertere Anwendungen können noch andere benutzerdefinierte Filter entworfen werden.
Filter können entweder als analoge Filter (aktiv oder passiv) oder als digitale Filter in Software aufgebaut werden.
Filter werden durch ihre Antwort auf bestimmte Signaltypen charakterisiert. Jedes lineare Filter hat eine Impulsantwort bzw. eine Sprungantwort und einen Frequenz- und Phasengang. Die Sprungantwort beschreibt den zeitlichen Amplitudenverlauf, wenn auf dem Eingang ein (idealer) Sprung aufgeschaltet wird; der Frequenzgang beschreibt die Amplitudenverstärkung (oder die Phasenverschiebung) zwischen dem Ausgangs‑ und Eingangssignal. Ist einer der drei Graphen bekannt, können die anderen beiden Graphen daraus berechnet werden.
Bei vielen Filtern gibt die ‑3 dB‑Frequenz an, bei welcher Signalfrequenz das Signal um ‑3 dB gedämpft ist. Sie wird auch schon wie vorher angedeutet bei bestimmten Filtertypen als Grenzfrequenz bezeichnet, bei welcher sich die Ausgangsleistung halbiert hat und die Amplitude auf 1/√2 = ca. 70% im Vergleich zur Eingangsamplitude gefallen ist, entsprechend einer Dämpfung von ca. 30%.
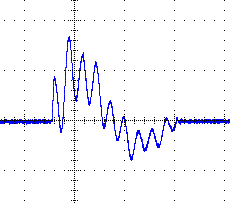
Digitale Filter lassen sich in zwei Kategorien einteilen: In FIR-Filter, Filter mit endlicher Impulsantwort (engl. finite impulse response filter) und IIR-Filter, Filter mit unendlicher Impulsantwort (engl. infinte impulse response filter). Wie die Namen schon andeuten, unterscheiden sich beide Filterarten u.a. in ihrer Impulsantwort im Zeitbereich. Folgende Abbildungen verdeutlichen die Unterschiede in der Impulsantwort beider Filterarten:
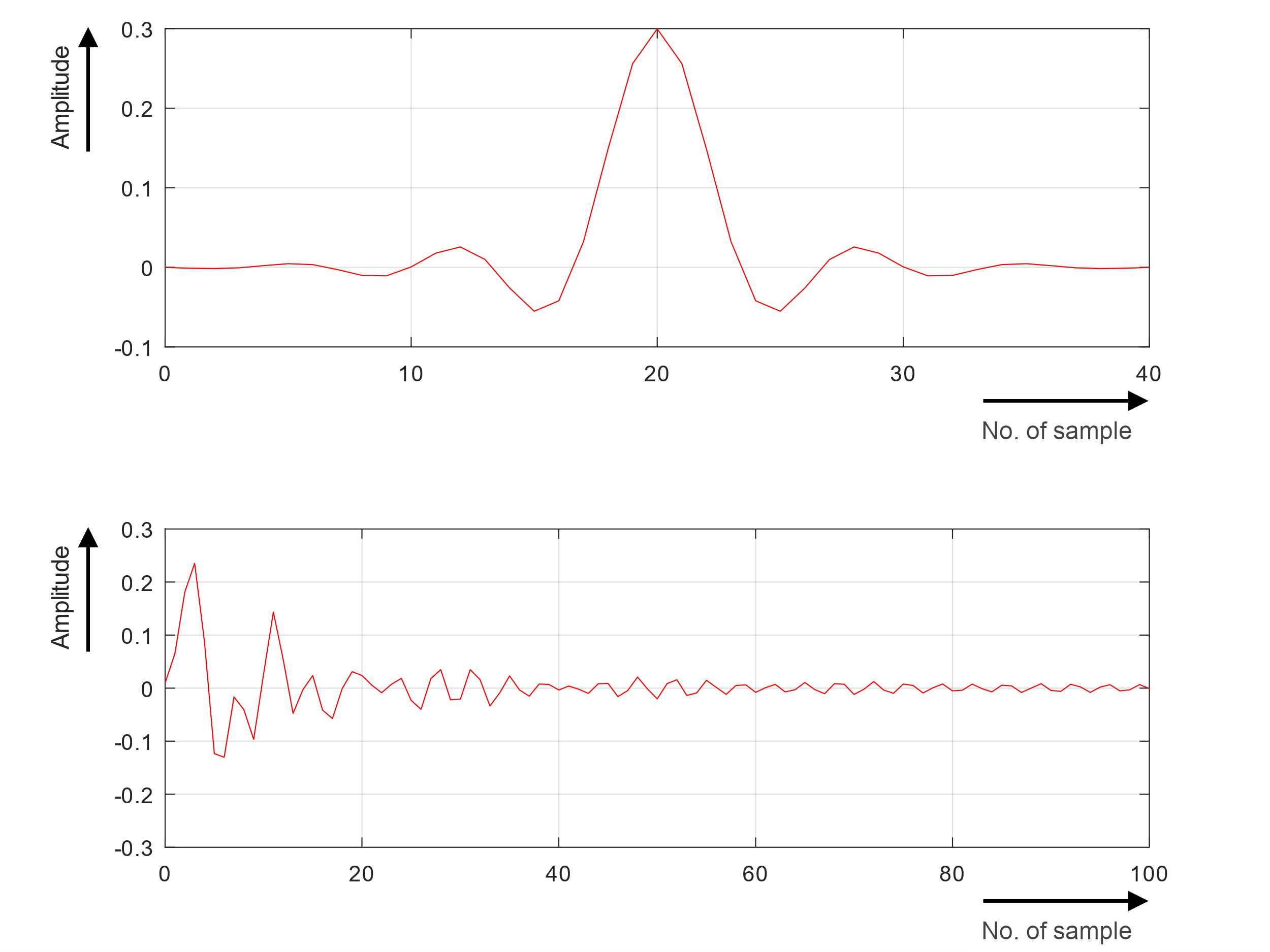
FIR‑Filter werden durch die mathematische Gleichung
beschrieben, es werden nur Eingangsdaten x(k – i) herangezogen. x(k – i) sind entsprechend abgetastete amplituden- und zeitdiskrete Werte. Bei einem FIR‑Filter wird die Impulsantwort nach einer endlichen Zeit zu Null, das bedeutet im Endeffekt, dass er immer stabil ist, da es keine Rückkopplung gibt und dass er einen linearen Phasengang haben kann. FIR‑Filter benötigen jedoch eine höhere Filterordnung um eine ähnliche Performanz wie IIR‑Filter zu erreichen, was zu einer größeren Berechnungszeit führt. „Höhere Ordnung“ bedeutet, dass mehr Filter hintereinander gerechnet werden müssen.
IIR‑Filter werden durch folgende Gleichung beschrieben
Um den Ausgangswert yk zu berechnen, werden neben den Eingangsdaten x(k ‑ i) auch zuvor berechnete Ausgangsdaten y(k ‑ j) verwendet. Das Filter ist also rekursiv aufgebaut. Deswegen werden IIR‑Filter auch rekursive Filter genannt. Die Impulsantwort ist bei einem IIR‑Filter unendlich, sie wird sich also nie stationär auf Null einschwingen. Dies kann im Endeffekt zu Instabilität führen.
Ein grundsätzlicher Effekt wurde hier nebenbei genannt: je wirksamer/aufwendiger ein digitaler Filter ist, desto höher seine Komplexität und damit seine Berechnungszeit in der Software. Dies führt praktisch zu Signalverzögerung.
Nyquist, Shannon und Falsch‑Signale: „Aliasing“
Das fundamentale Abtasttheorem besagt, dass wenn ein Messgerät ein analoges Signal mit einer konstanten (gleichbleibenden) Abtastrate abtastet, welche mehr als zweimal so groß ist als der höchste vorhandene Frequenzanteil im Signal, so kann das ursprüngliche analoge Signal komplett aus den diskreten Datenpunkten wiederhergestellt werden.
(Hinweis: Die höchste im Signal vorhandene Frequenz wird auch als die Bandbreite dieses Signals bezeichnet.)
Und das ist ja das eigentliche Ziel einer analogen Messung, dass das Originalsignal möglichst genau = richtig = vollständig in der Steuerung digital zur weiteren Bearbeitung im Programm vorliegt. Wobei die Eingrenzung zu treffen ist, dass nur für den weiteren Ablauf wesentliche Signalteile (hier ist gemeint: Frequenzbereiche) erfasst werden müssen. Idealerweise wählt der Anwender bewusst und reflektiert diese Eingrenzung. Beispiel: Eine langsame Temperaturregelung muss gegen niederfrequente Signale unempfindlich sein, dies könnte ggf. den Regler stören.
Um das analoge Signal also möglichst genau aufzunehmen, muss einerseits die Signalbandbreite fSignal durch geeignete Filterung (siehe Kapitel „Filter“) so eingeschränkt werden, dass nur das gewünschte Signal aber keine Störer durchgelassen werden, und andererseits die Abtastrate fSampling so gewählt werden, dass das Signal originalgetreu aus den Datenpunkten wiederhergestellt werden kann. Deswegen müssen wir uns mit dem Verhältnis der tatsächlichen Abtastrate fSampling vs. fSignal auseinandersetzen.
(Hinweis: Jede Messung findet in den zwei Dimensionen Zeit und Messgröße statt. Hier konzentrieren wir uns auf die zeitliche Dimension, sprich: auf die Abtastung.)
Zum Abtasttheorem folgen einige theoretische Betrachtungen; veranschaulicht an einem analogen Signal und unterschiedlichen Abtastraten.
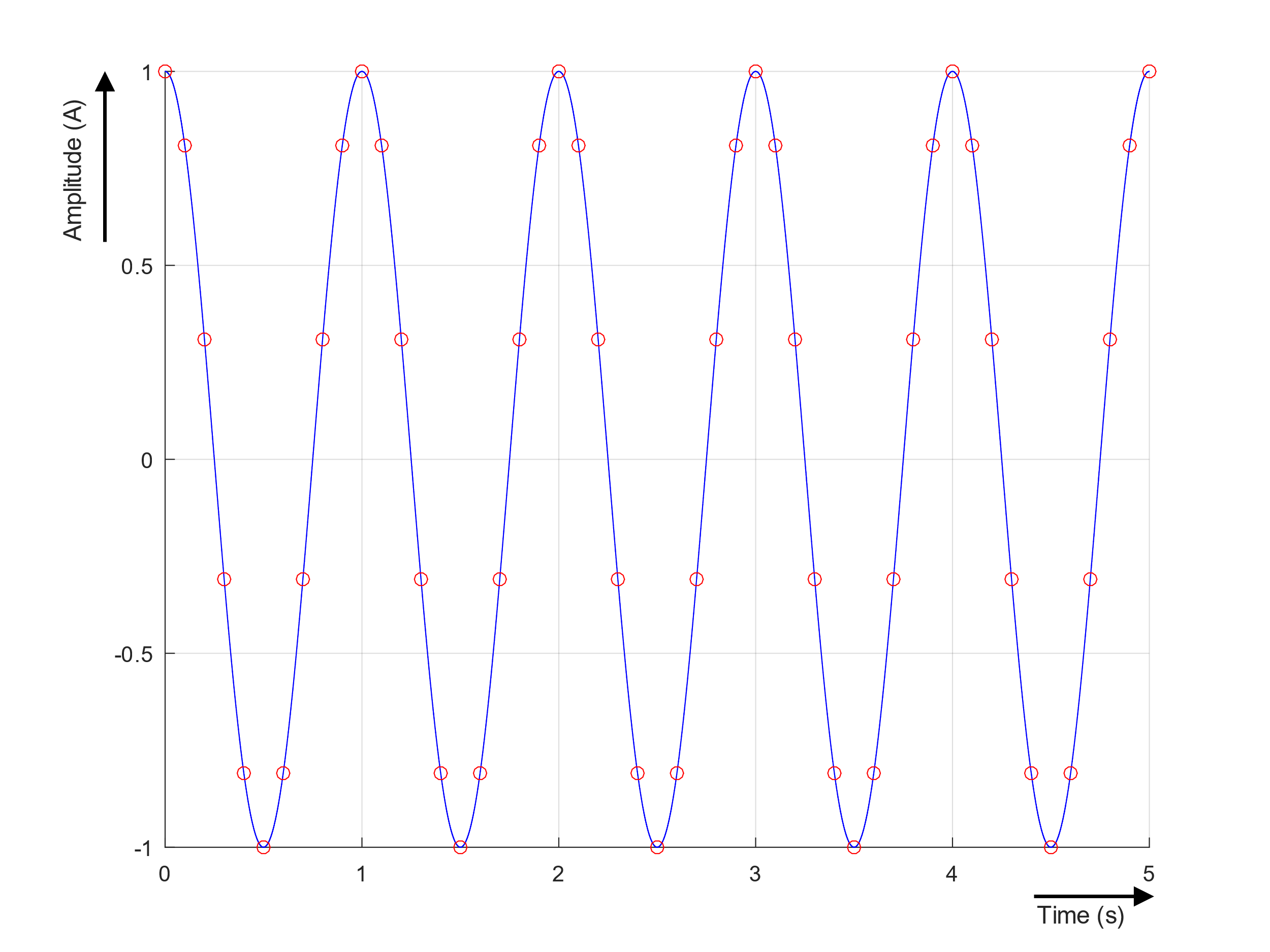
Das analoge Signal mit f = 1 Hz wurde mit fSampling = 10 Hz abgetastet. Der größte (und einzige) Frequenzanteil in diesem Beispiel ist 1 Hz, deswegen ist auch fSignal = 1 Hz und damit fSampling = 10∙fSignal. Es ist leicht zu erkennen, dass aus den diskreten Werten das ursprüngliche analoge Signal nachgestellt werden kann. Beispielsweise könnte eine „fast Fourier Transformation“ (FFT) aus den o.a. Daten berechnet werden. Dies wäre problemlos möglich; das resultierende Spektrum würde dann bis fSampling/2 = 5 Hz, mit einer Auflösung von 0,2 Hz reichen.
Falls das Analogsignal keine „reine“ Sinuswelle gewesen wäre, sondern harmonisch gezerrt und verrauscht, dann wäre fSignal aufgrund hierin enthaltener höherer Frequenzanteile nicht mehr 1 Hz sondern i.d.R. deutlich größer. Dann muss je nach Auswerteziel fSampling >> f gewählt werden! Das gilt auch im Allgemeinen, wie etwas später erklärt wird.
Die nächste Abbildung zeigt, was passiert, wenn das fSignal = 1 Hz Signal mit fsampling = 2 Hz abgetastet wird, also fsampling = 2 · fSignal.
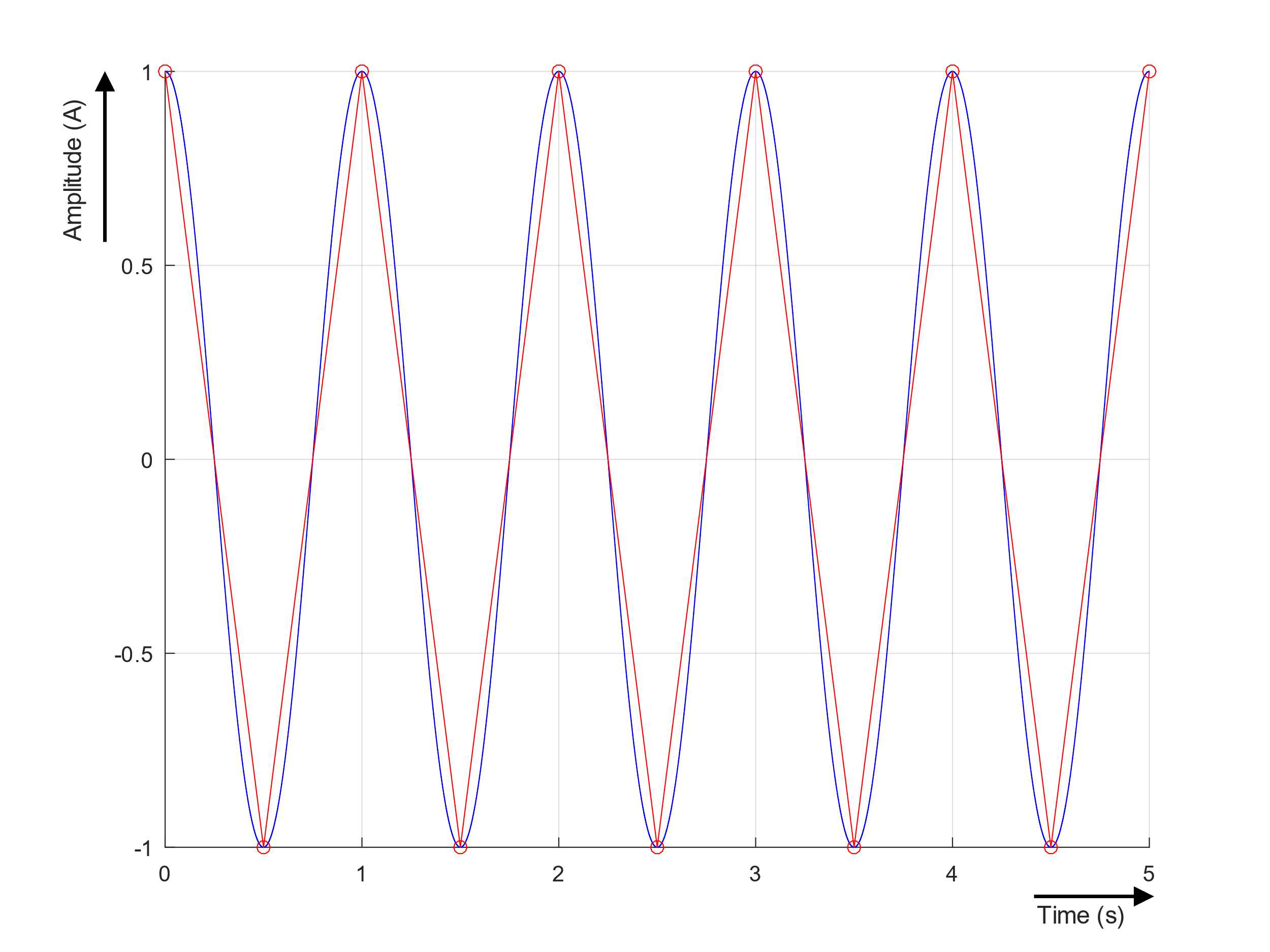
Da in diesem Beispiel eine aus dem Abtasttheorems resultierende Vorgabe soeben noch eingehalten wird, ist es noch möglich, die Frequenz und die Amplitude des Signals zu erkennen: fSampling ist gleich groß wie 2 ∙ fSignal.
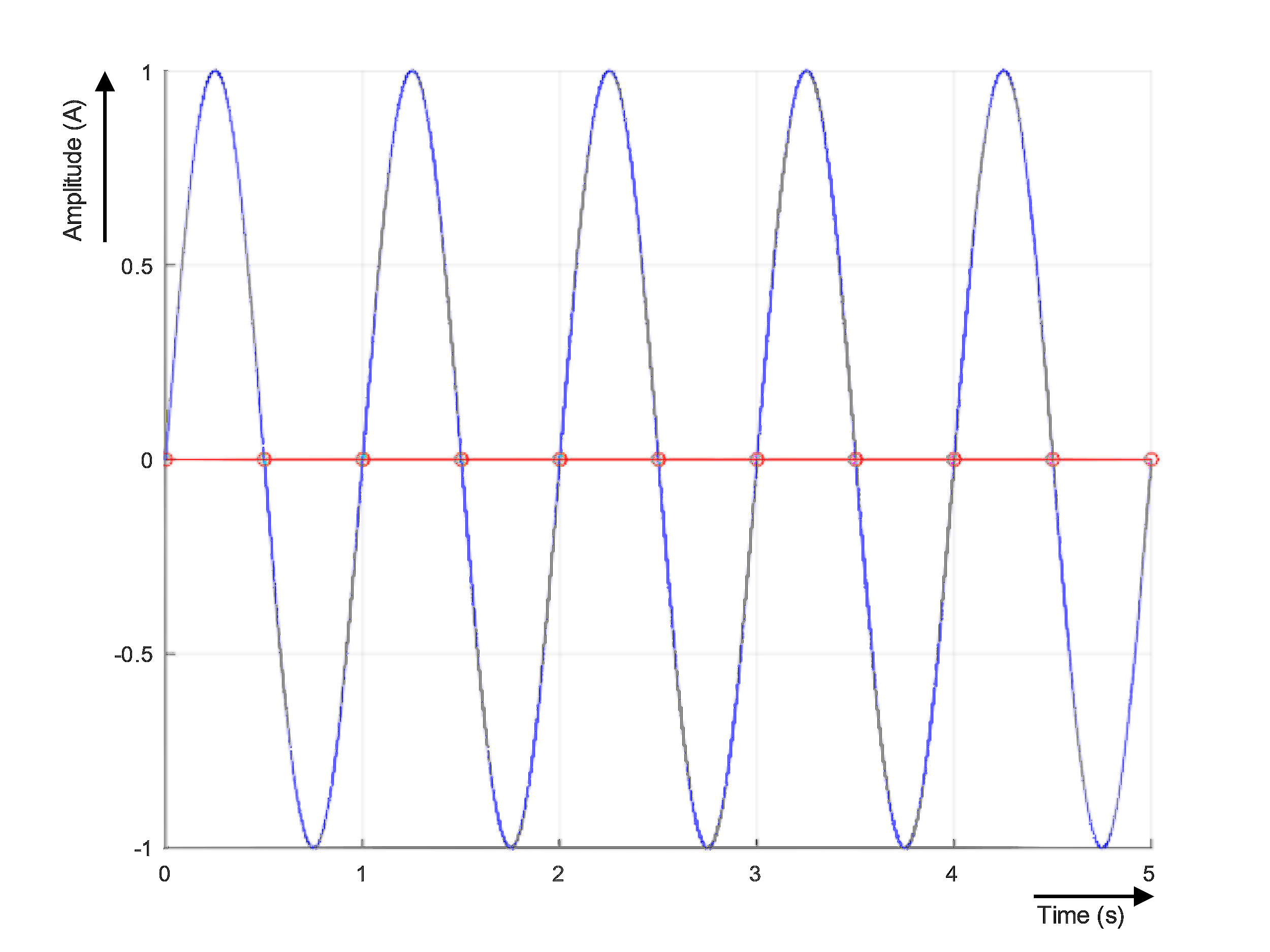
Nicht ohne Grund ist dies jedoch nicht mehr im Allgemeinen möglich, da hier folgendes Problem erkennbar wird, wenn man sich vorstellt, dass die Abtastmomente zufällig um 90° phasenverschoben zum Signal liegen würden. Dann wäre der Wert des Signals an jedem Abtastpunkt gleich Null, und keine Erkennung der Frequenz oder der Amplitude mehr möglich.
Viel wahrscheinlicher aber ist eine Lage der Messpunkte „irgendwo“ auf dem Signal:
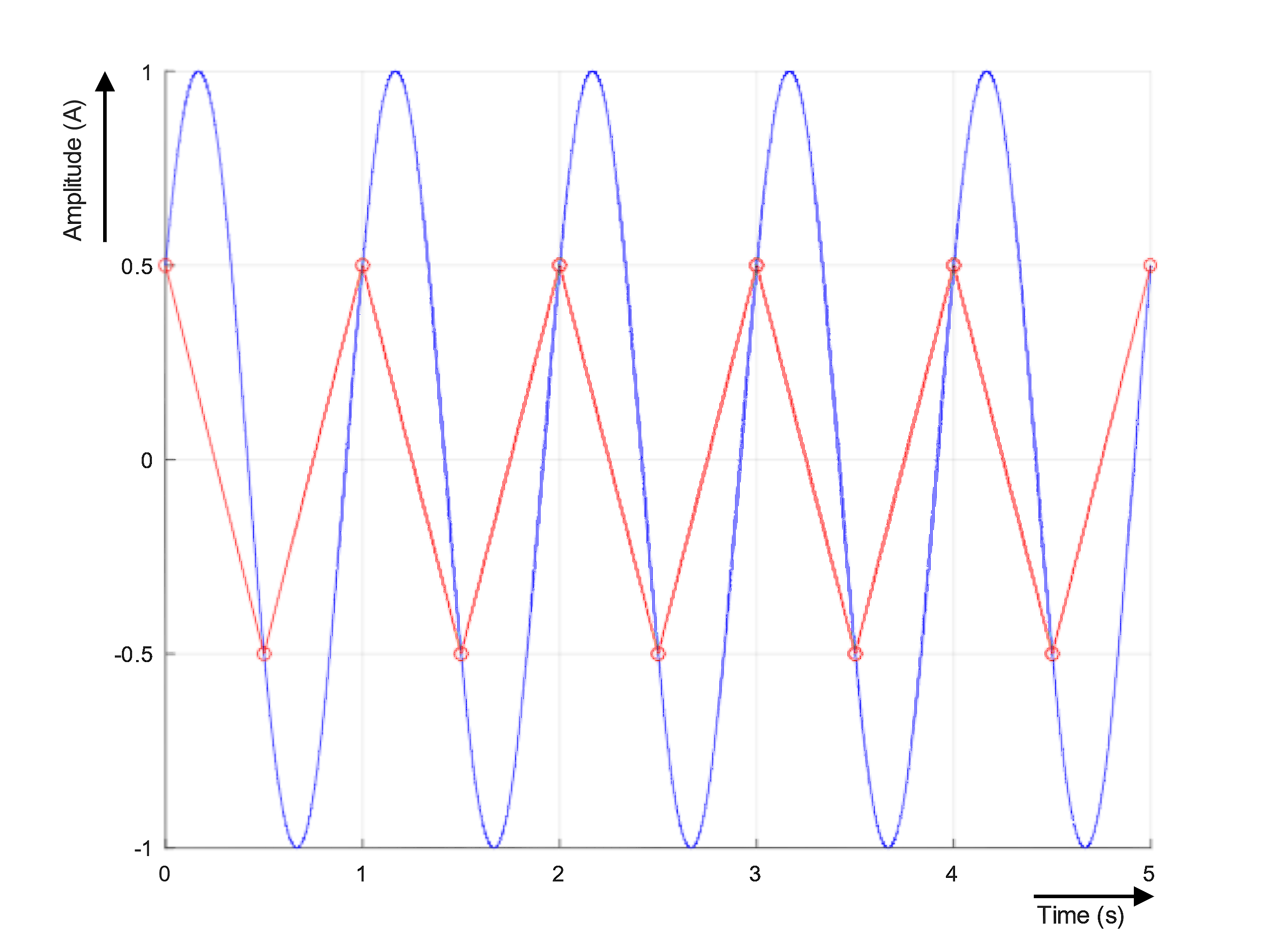
In diesem Fall kann zumindest die Frequenz aufgrund der Nulldurchgänge noch ermittelt werden, aber der Spitzenwert (und damit eine ganz wesentliche Signalinformation) ist nicht ermittelbar, da nicht klar ist, wo die Messpunkte auf dem Ursprungssignal liegen. Praktisch wird aber weder fSampling noch fSignal hochkonstant sein und es kommt bei längerer Beobachtung zu veränderlicher Phasenlage und der Spitzenwert wird doch „irgendwann“ erwischt. Beim schnelllebigen Industriesignal ist das aber wenig nützlich.
Nach der ganzen Theorie das ganze nun konkret an einem realen Bespiel: die induzierte Spannung eines drehenden Zahnrads an einer Spule als Drehzahlsensor ergibt im TwinCAT ScopeView folgende Abbildung:
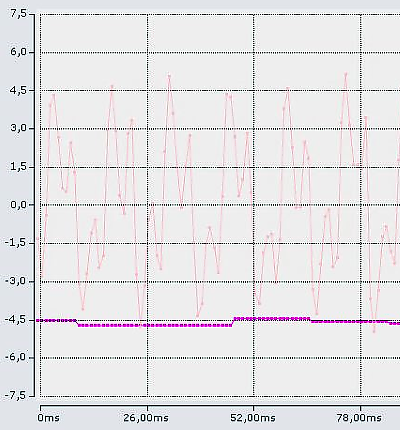
Die Auswahl einer höheren Abtastfrequenz (Samplingrate) wäre hier vorteilhaft, um den Amplitudenverlauf besser verfolgen zu können, denn anscheinend überlagern sich hierbei Signale. Für die Drehzahlbeobachtung mögen die Nulldurchgänge ausreichend sein.
Die Frequenz
wird auch Nyquist-Frequenz genannt. Beinhaltet ein analoges Signal gleich große oder größere Frequenzanteile als die Nyquist-Frequenz, so kann das ursprüngliche Signal nicht mehr rekonstruiert werden. In der Praxis wird die Nyquist-Frequenz mindestens um einen Faktor von zwei- bis dreimal größer als die Bandbreite der Signalfrequenz fSignal gewählt.
Das resultierende Problem des nicht‑rekonstruierbaren Ursprungssignals aufgrund von fSignal ≥ fNyquist wurde im letzten Beispiel bereits angedeutet. Folgende Abbildung verdeutlicht das Problem.
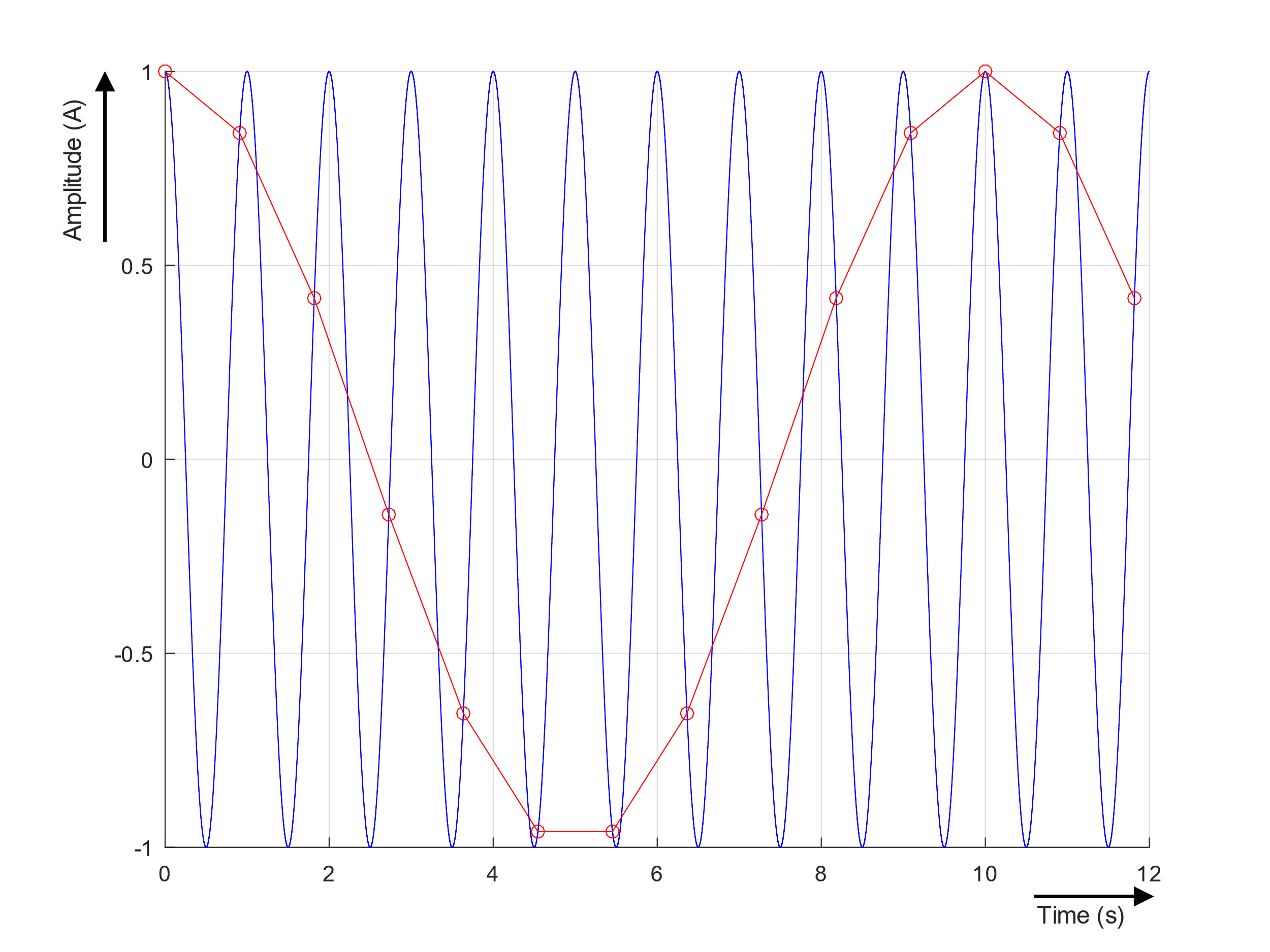
Hier ist fsampling = 1,1 · fSignal. Die Frequenzinformation des ursprünglichen blauen Signals ist verloren gegangen. Es scheint aus Sicht der Steuerung (die nur die roten Messpunkte „sieht“), dass das gemessene rote Signal ein Signal mit einer kleineren Frequenz ist. Dieser Effekt wird Aliasing genannt, weil eine andere Frequenz erkannt wird, und ist ein allgemeines Problem, wenn das fundamentale Abtasttheorem (auch Shannon‑Nyquist-Abtasttheorem genannt) verletzt wird. Die scheinbar erkannte Alias-Frequenz in diesem Fall ist falias = 0,1 Hz.
Das Shannon-Nyquist Theorem und die Alias-Effekte konzentrieren sich allein auf die Frage, ob das ursprüngliche Analogsignal aus den abgetasteten Werten rekonstruiert werden kann. Dieses kann nicht alleiniges Kriterium zur Auswahl eines Analogeingangs sein, sie ist aber ein wesentliches. In der Praxis gibt es Situationen, wo man bewusst das Abtasttheorem verletzt, um z.B. schnelle Signaländerungen zuverlässig erkennen zu können. Da man als Anwender bereits vorher einiges über das zu messendes Analogsignal weiß, sind solche Überlegungen durchaus möglich und helfen in vielen Fällen, das Messsystem zu optimieren.
Weitere Effekte
Weitere Phänomene aus dem Umfeld der Messung von Wechselgrößen wie Rauschen, Verzerrung, Signalübersprechen und Signalverzögerung im Detail werden hier zu gegebener Zeit weiter beleuchtet.
Reaktion oder Recording? Oder beides?
Zuletzt muss aus Anwendungssicht grundsätzlich betrachtet werden, ob die Anwendung eine Reaktionsaufgabe, eine Datenaufzeichnungsaufgabe oder eine Mischung davon ist.
- Reaktion:
- Beispiel: ein Abstandssensor mit 10 V‑Analogausgabe erkennt ein per Förderband mit 10 m/s kommendes Objekt, und wenn 5 V überschritten sind, soll in möglichst kurzer Zeit ein Ventil für einen Farbauftrag geöffnet werden. Ein anderes Extrembeispiel wäre die Stromregelung in einem Software‑kontrollierten Magnetlager.
- Zu wählen wäre:
# ein analoger Eingang mit hoher Samplerate, breitbandigem Filter, ggf. sogar DistributedClock Timestamp Funktion (wobei der Bezug zur absoluten Weltzeit wohl keine Rolle spielt)
# kurze EtherCAT Zykluszeit und kurze PLC‑Zykluszeit, ggf. 100 µs oder weniger - Nebensächlich ist in dem Beispiel die analoge Genauigkeit, eine Langzeitaufzeichnung der Messwerte wird wahrscheinlich auch nicht erfolgen
- Datenaufzeichnung/Recording
- Beispiel: ein mehrtägiger Dehnungsversuch an einer Stahl‑Struktur mit langsamen Bewegungen im Sekundenbereich.
- Zu wählen wäre:
# einen Präzisionsanalogeingang, wichtig sind geringes Rauschen und hohe Temperaturunempfindlichkeit, Synchronisierung über mehrere Kanäle hinweg, ggf. sogar Absolutzeitsynchronisierung zur GPS‑Uhr
# langsame EtherCAT‑Zykluszeit, vermutlich wird das Auswerteprogramm in C/PLC/Matlab der Steuerung einiges abfordern - Nebensächlich ist hier vermutlich die Abtastrate. Signale mit kurzen Anstiegs- und Abfallzeiten sowie Dämpfungsfragen aufgrund hoher Frequenzen sind nicht zu erwarten
- Neben den o.a. Extrembeispielen sind die meisten Industrieanwendungen eine Mischform der beiden. Wobei die Frage, ob eine Reaktion im 100 µs‑Bereich „schnell“ ist, nur der Anwender in Ansehung seines Problems beurteilen kann: für eine Temperaturüberwachung im Sekundenbereich ist das „zu schnell“, für eine Laserüberwachung „zu langsam“.
Am Ende müssen also die analogen und zeitlichen Eigenschaften der Beckhoff‑Analoggeräte gegenüber der Problemstellung beurteilt werden.
Auswirkung auf analoge Eingangsgeräte und Auslegung derselben
Je nach beabsichtigtem Einsatzziel müssen vom Hersteller analoger Eingänge einige grundsätzliche Entscheidungen in der Designphase getroffen werden. Für die Fragen
- Abtastrate: Welche Bandbreite sollen überhaupt gemessen werden,
- und dann wie genau (also wann beginnt welche Dämpfung )
- Verzögerung: Um wieviel Zeit verzögert darf das Signal in der Steuerung ankommen
sind somit auch bei Beckhoff verschiedene Antworten in Form von Analog‑Eingangsgeräten formuliert worden. Der Anwender kann mithilfe
- den Beckhoff‑Dokumenten (z.B. dieses Handbuchs)
- des Beckhoff Vertriebs
- und ggf. praktischen Versuchen
das richtige Gerät für seine Anwendung finden.
Hinweis | |
kHz vs. kSps Hinweis: um sprachliche Missverständnisse in Dokumentation und Vertriebsgespräch zu vermeiden, wird die ankommende Signalfrequenz fSignal bei Beckhoff mit der Einheit [Hz] beschrieben, die technische Samplingrate fsampling des analogen Eingangs mit (Samples pro Sekunde) bzw. [kSps] (Kilo Samples pro Sekunde). |
Eine grobe Einordnung dazu wie folgt:
- Die EL30xx‑Klasse mit ihren 10V/20mA Eingängen sind für einfache Messungen an langsamen Signalen mit 12 Bit Auflösung konzipiert. Deshalb sind der Hardware‑Filter und die Samplingrate sehr niedrig angesetzt.
- Die EL31xx‑Klasse (auch: EP31xx, EJ31xx) mit ihren 10V/20mA Eingängen mit 16 Bit Auflösung sind für schnelle Signale und Reaktionsaufgaben ausgelegt. Um auch schnell veränderliche Signale der Steuerung zügig mitzuteilen, ist sogar der Hardwarefilter absichtlich höher als die Abtastrate gewählt. In Messapplikationen kann dies aber zu Alias‑Signalen führen.
- Die Produktgruppe Messtechnik der ELM3xxx‑Klasse (auch: EPP35xx) sind konsequent auf Signalrichtigkeit in Recording‑Anwendungen ausgelegt, der Hardware‑Filter liegt mit seinem ‑3dB‑Punkt deutlich unter der halben Abtastrate. Die ELM3x0x‑Klasse „10 kSps“ ist eher für schnellere Aufgaben, die ELM3x4x‑Klasse „1kSps“ eher für langsamere geeignet.
- Darüber hinaus sind in den diversen Sonderfunktionsklemmen speziell für den Anwendungsbereich passende Eckdaten festgelegt worden, die hier nicht im Einzelnen alle aufgeführt werden können. z.B. verfügt die EL3632 / EPP3632 veränderliche Hardwarefilter, die sich an die Abtastrate anpassen lassen.